Much work has been done on the stabilisation system. Accomplishments have been:-
- Updates to payload tray to hold the 2 x 240mAH LiPo batteries
- Tray mods to help run wires
- Improvements in design/methodology to assemble the whole unit
- Resolution of the Crashing issue with the Arduino program
- Creation of the bottom servo mechanical units
- Updates to program to save servo move data
- Updates to program to allow movement of Servo 0.2 seconds after flight has commenced.
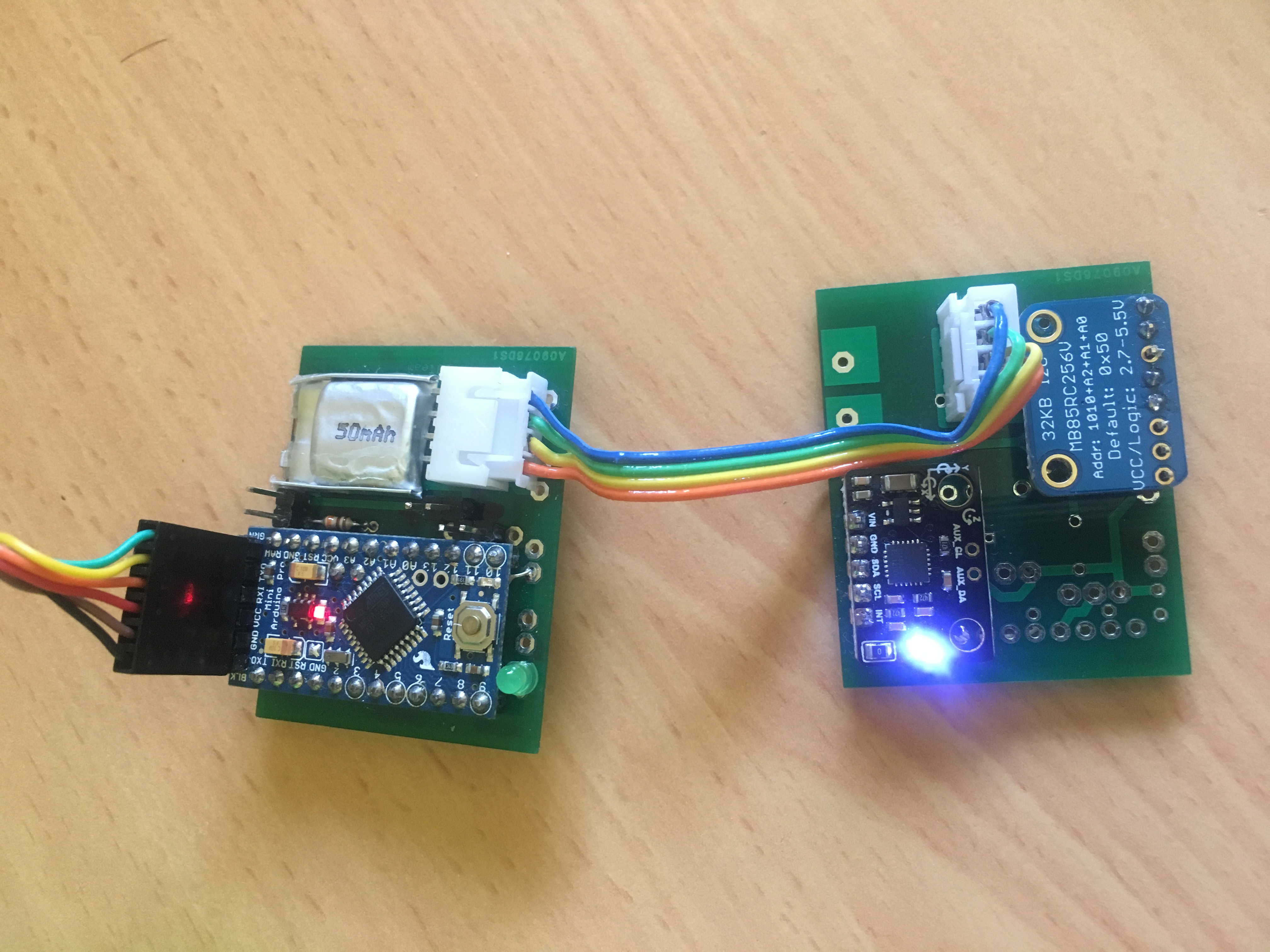
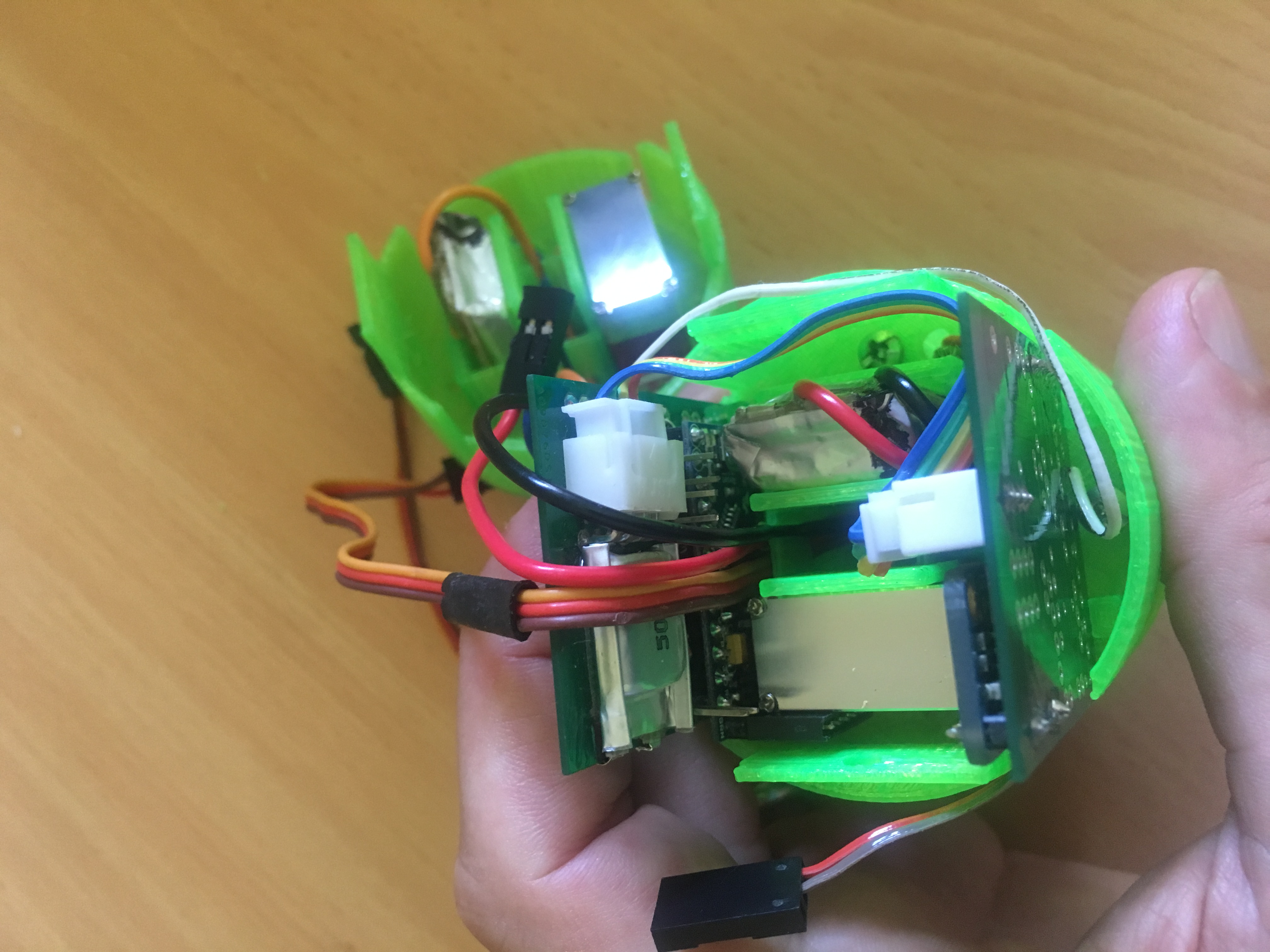
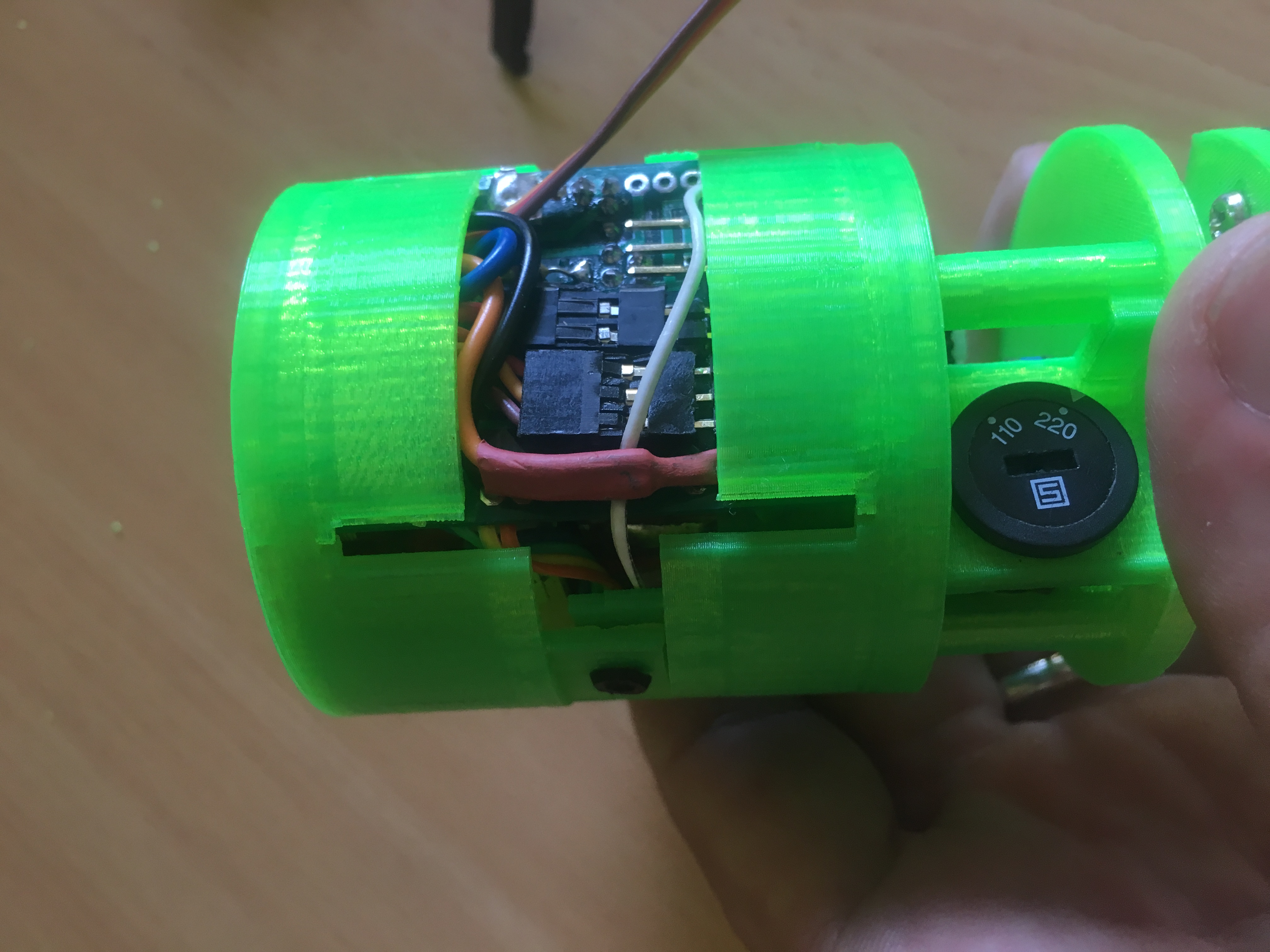
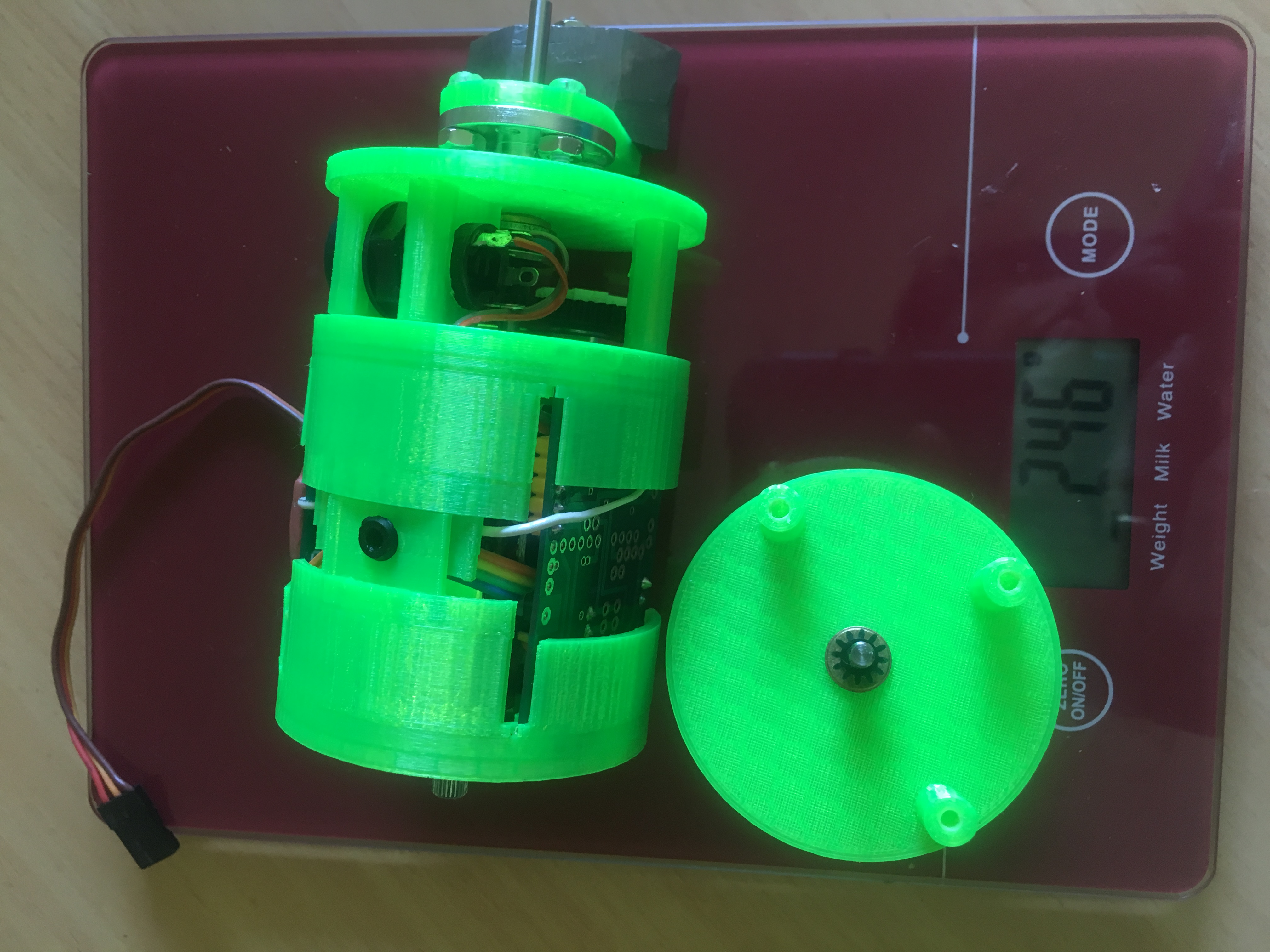
We have started to assemble everything. There is a large amount still yet to be done. Here are some pictures of the components being assembled.