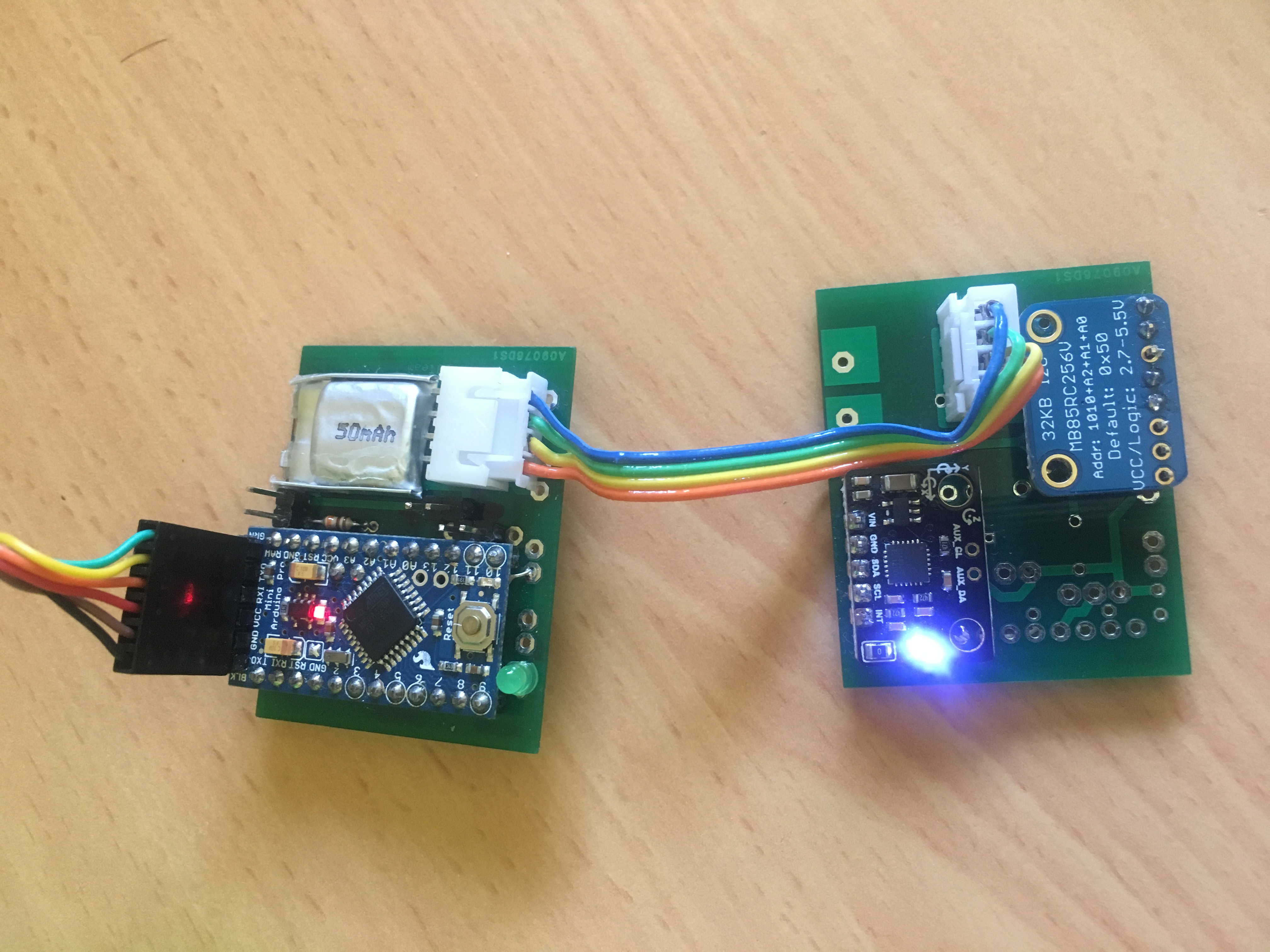
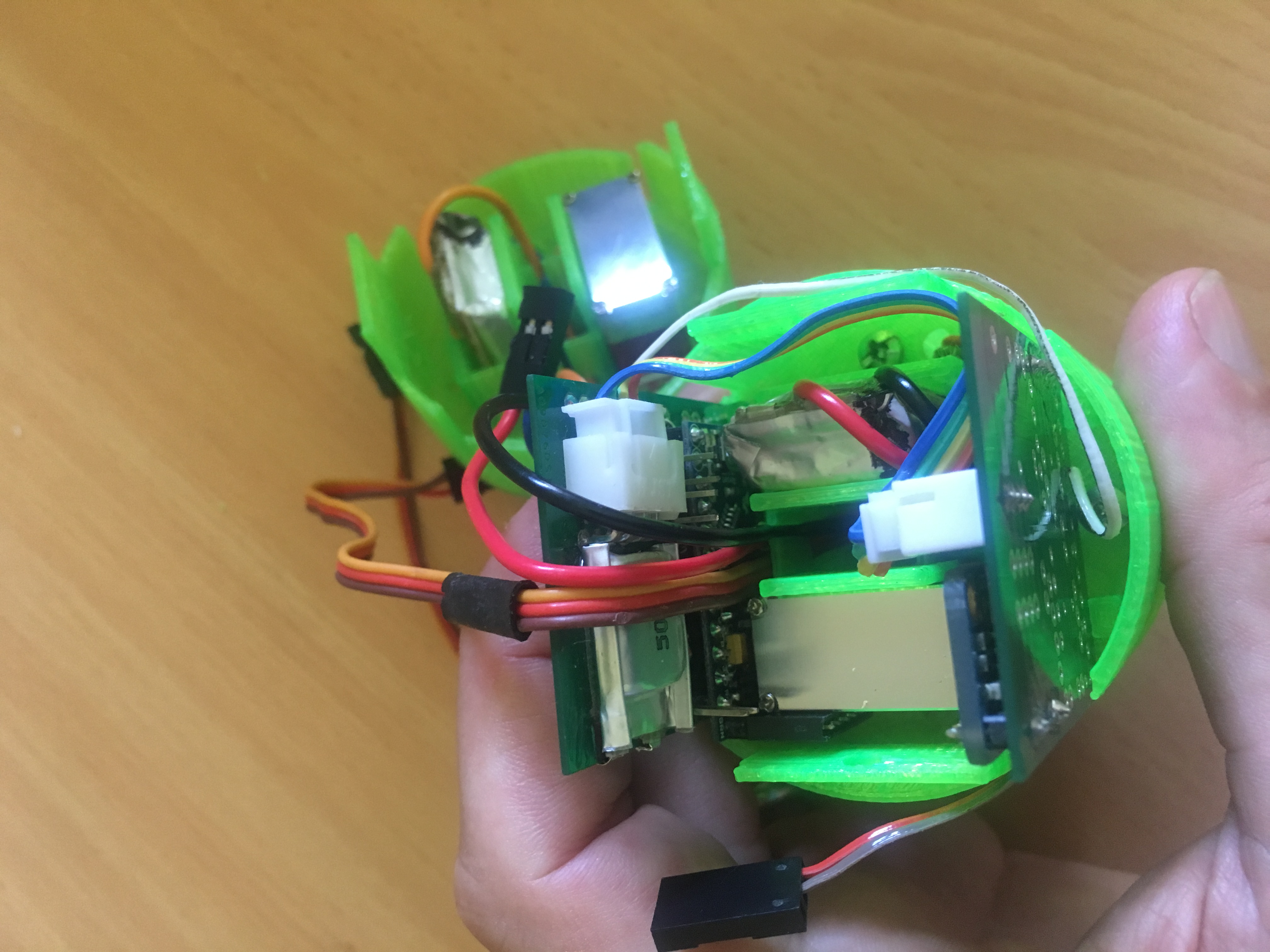
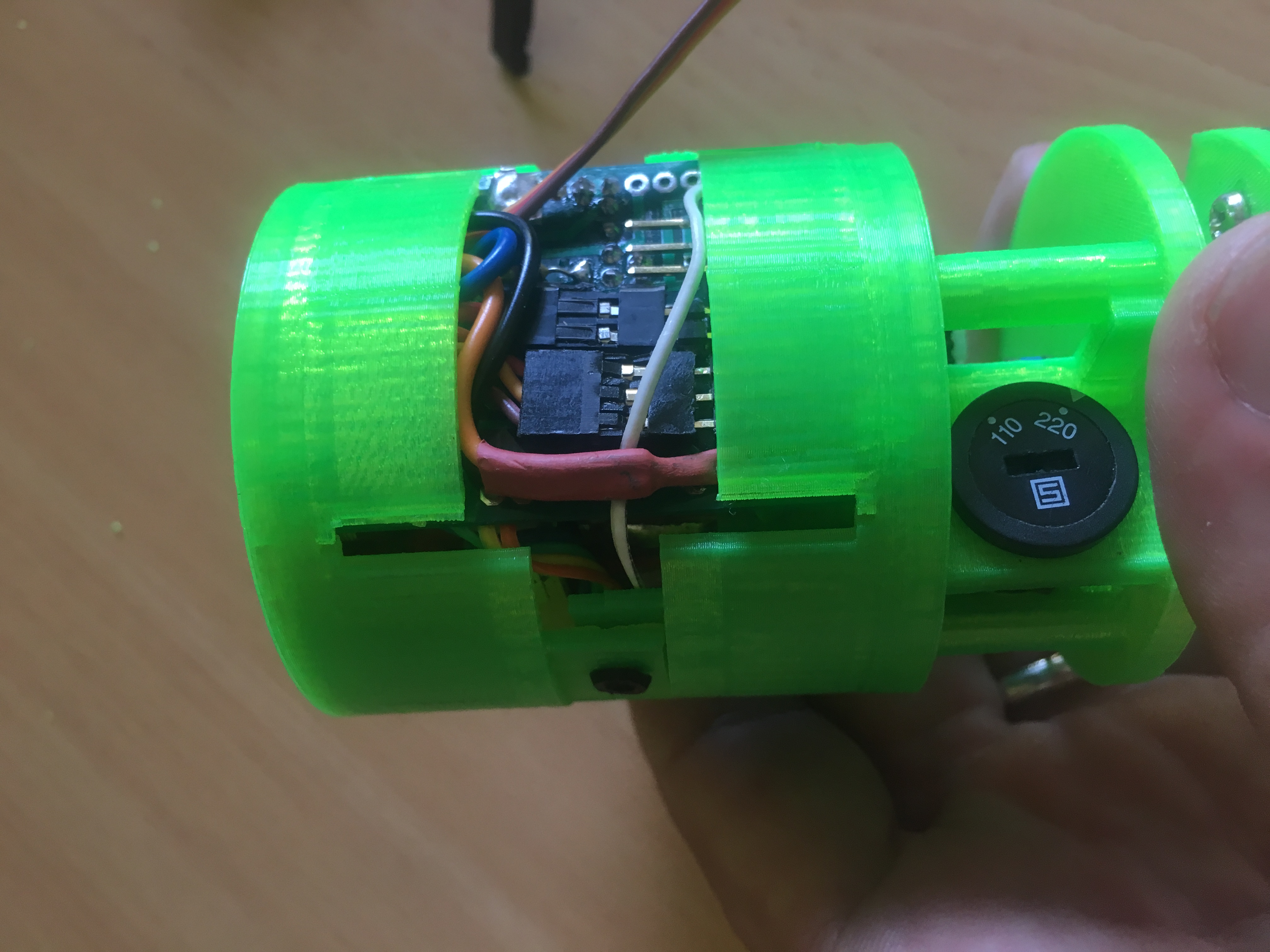
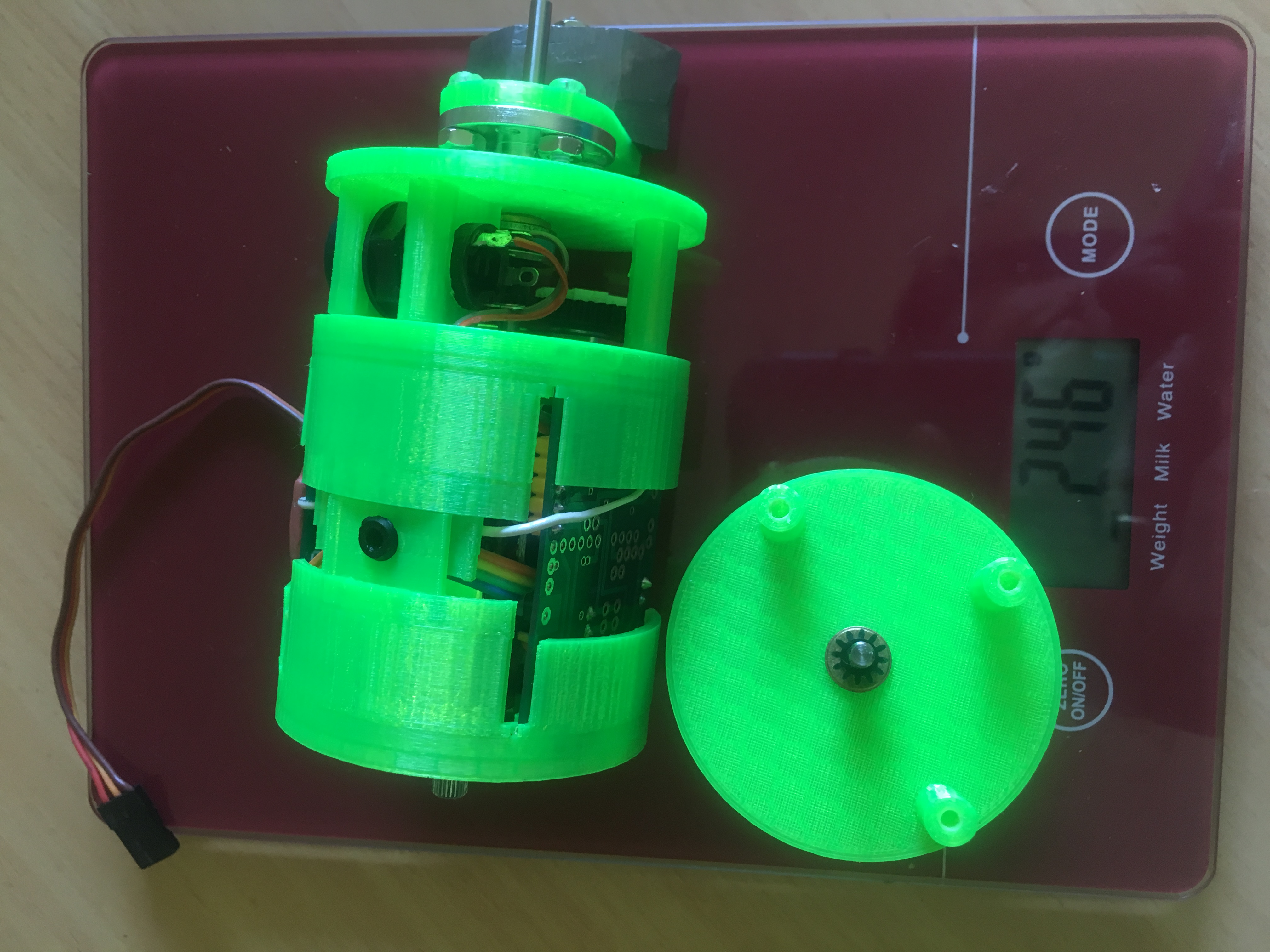
I’ve created a jig (from 3-D Printout and some wood) into which we can mount the Stabilisation system and have it connected to the computer and to either an internal or external PSU for the Servo Motors. This set-up is good, because it allows me to easily update the Arduino program as I find bugs or worthwhile enhancements.
Below is a video a recent test.
In the first ~4 seconds, it shows me lifting (accelerating) the system up. You will notice that the red turns off. This marks the time that the rocket has sensed sufficient acceleration for it to assume the rocket has been launched.
Then we see after a very short period (0.1 seconds in real time), the red LED turns on. This marks the time the rocket circuitry has decided that it should move the masses. You see them moving very quickly to the front.
Then as the movie continues (in normal speed), you see me rotating the rocket, but the masses continue to maintain their ‘direction’. This is to ensure that the moment generated by the rocket motor stays in the same direction.
It has been estimated that in a state of minimal air resistance this would lead to an angle of ~ 14 degrees. Of course, there will be air resistance and this experimental launch will give us an indication of the ‘real’ amount it affects the motion of the rocket. This is very important for us in the tuning of the stabilisation system.
I’ve created a Java 3D simulation of this rocket during the motor firing.
This is for a Callisto rocket with a 125G131-14A (SS) motor. It’s final motion properties are:-
- Rotational Velocity: 32 degrees/second
- Rotational Position: 14 degrees from the vertical
- Down-Stream Position: 1.25 metres
- Down-Stream Velocity: 6.5 metres/second
We can determine that that the masses are moved to their position 2 frames later, so the total number of frames passed by time masses are moved is 5. This equates to approximately 0.21 seconds.
We are interested to know is what the velocity and position is when this starts. We want it to be when stabilisation has occurred, but we also want as much time as possible in this position, so we can maximum amount of data.
NOTE: I am aware that the moment generated is a result of ALL the forces on the rocket cross product with the distance vector and I’m obviously ignoring a non-trivial force, the aerodynamic forces. It is expected however that we should see some tenancy for the rocket to veer to one side. The results will be interesting and useful.
It is expected that shortly after the rocket motor has finished, the rocket still stabilise and not rotate much more. This is because aerodynamic forces will provide counter-acting Moment.