
A lot of work has been done constructing the payload and programming the micro-controller. Preparations are now underway for the next model rocket launch.
Below is a picture with everything assembled.

The payload airframe section (the grey section in the above picture) will be painted white. Read on to find out more about the payload and what it can do.
Payload
The launch will have an experimental payload included on it which will:-
- Capture Video of flight at 720 x 480 with sound using a 808 keychain camera

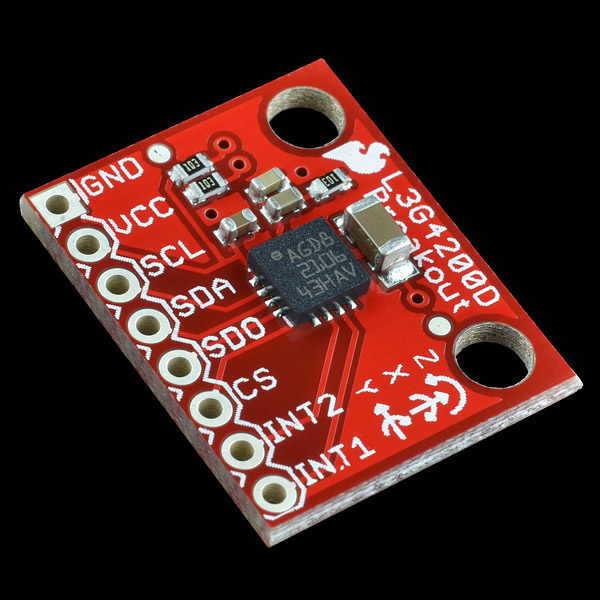
- Capture and record gyroscope data (rotational speed) using a L3G4200D breakout board
- Capture and record air pressure and temperature measurements using a MPL3115A2 sensor

The final payload (before sliding into air-frame) looks like:-
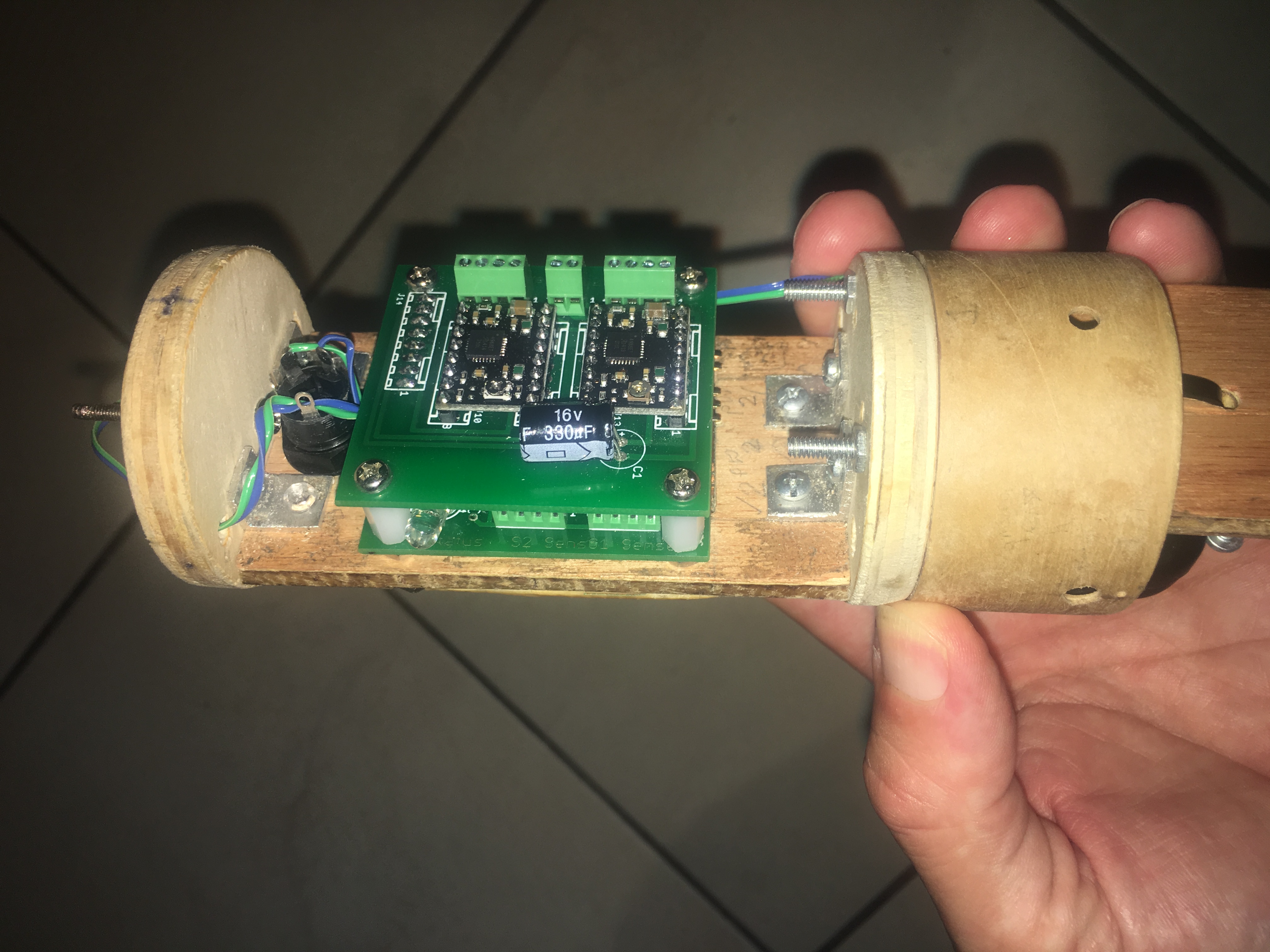
The sensors are sandwiched between the PCBs and the battery board. Space really is a premium.
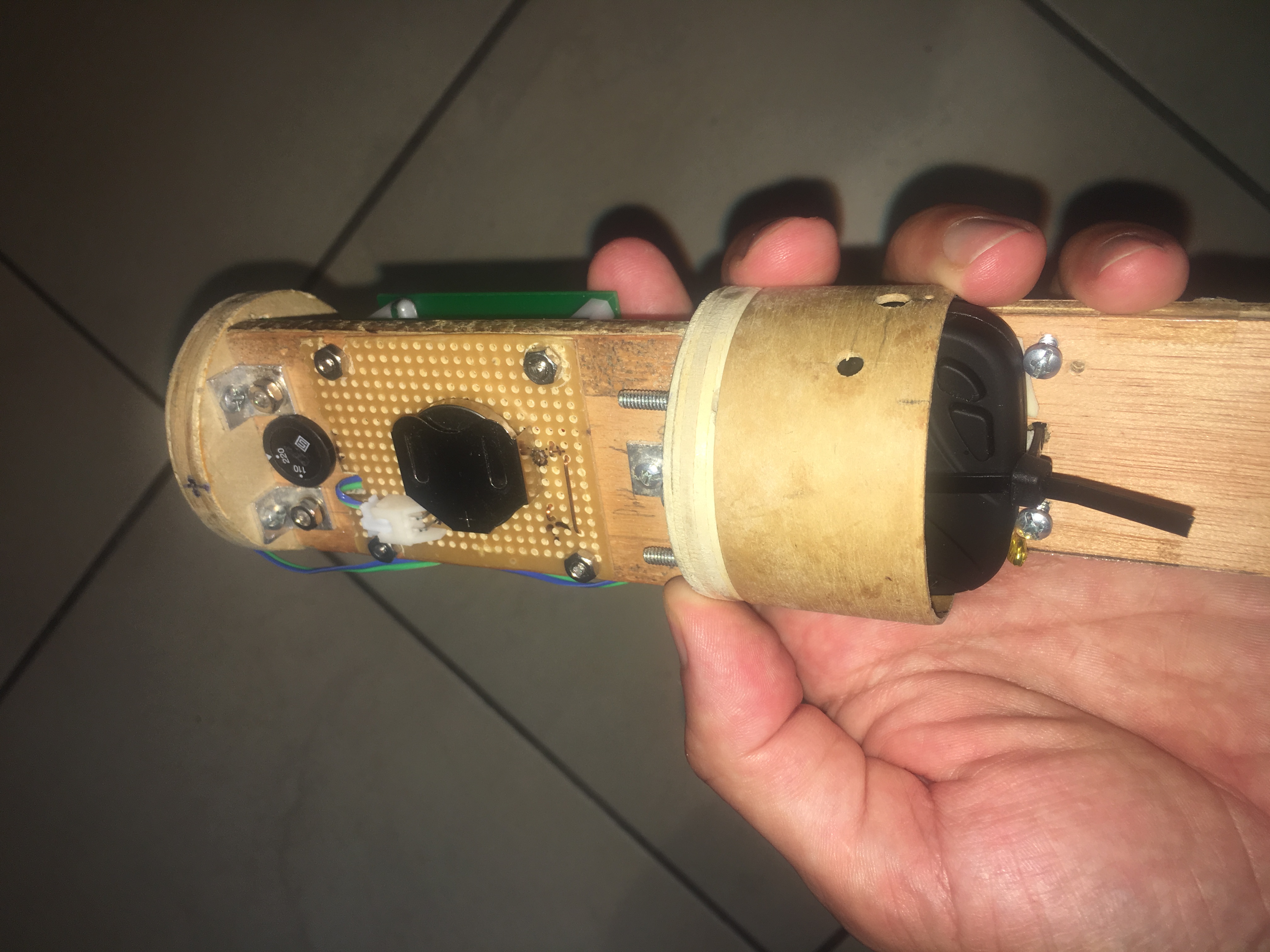
Notice the coin cell batter and the rotary switch on the LHS and the camera on the RHS. The rotary switch is accessible from the outside.
Payload Data
It is certainly an ambitious project, but hopefully will produce some results that will allow us to characterize the motion of the rocket as well as test our payload design and operation. The Air Pressure results will allow us to approximate the altitude of the model rocket over the flight which we will then be able to compare to our simulations. The gyroscope readings will be very interesting when we compare with video recorded motion of the rocket. Temperature will be interesting, but is of less importance.
I’ve created a video that allows us to compare the ‘real world motion’ of the payload when compared with the motion depicted using the gyroscope data. See below.
The Rocket Motor
We will be utilising a G76-10G Aerotech engine. This translates to an average thrust of 76 Newtons over the total burn time of approximately Below is a plot from OpenRocket.
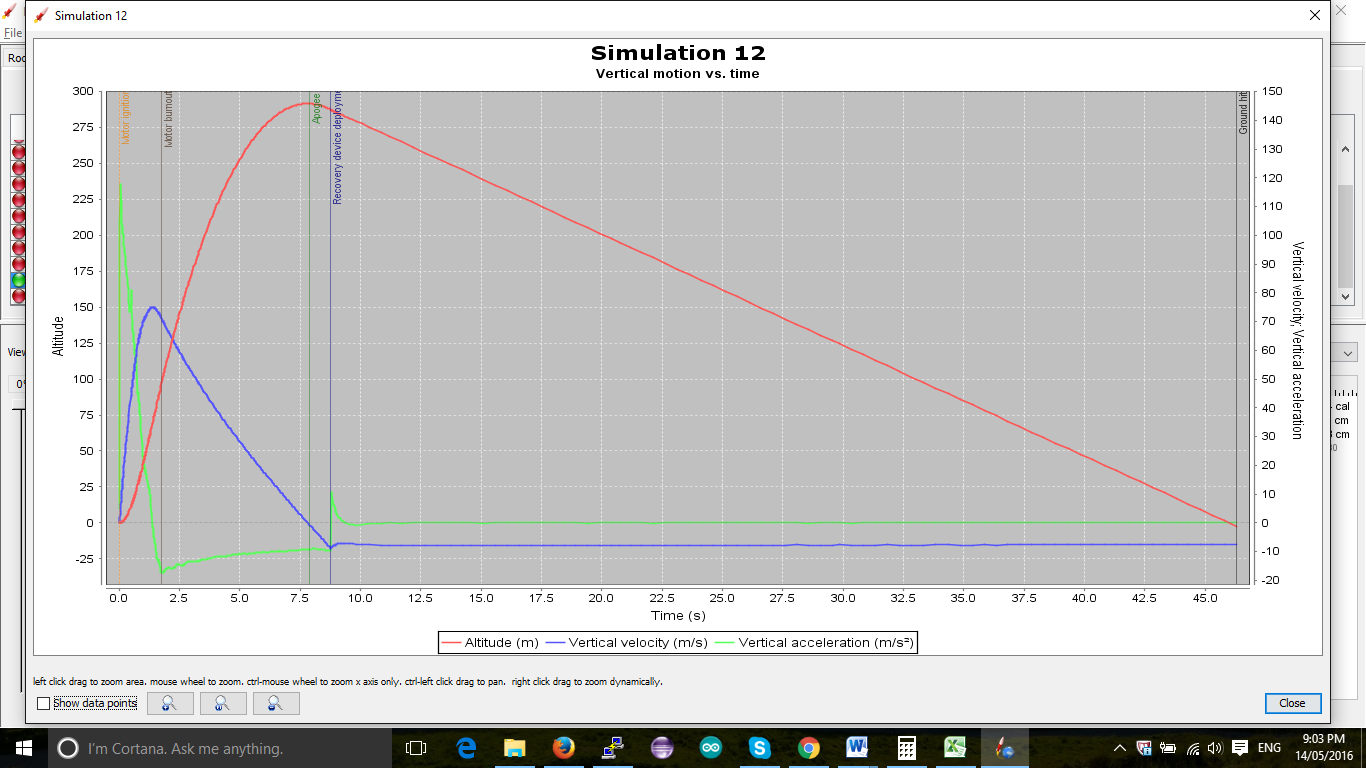
As you can see, this rocket will achieve an altitude just shy of 300 metres. (less then 1000 feet). This is well short of the 4000 feet ceiling we have at our launch site. We still expect the launch to be spectacular.
Remaining Preparations
Remaining preparations include:-
- Generating Launch simulation to ascertain key information like ejection delay, speed of rocket off the launch rail
- Confirming CG and CP points (checking stability of the rocket)
- Confirming launch location suitability and timing
- Checking and testing launch Electronics systems
- Charging batteries
- Performing inventory check and packing boxes with required items
- Writing and testing procedures
- Double checking motor risks (issues that other people have recognised with the motor). The AusRocketry forums were helpful in this respect.