On the 13th of September, we did a Model Rocket Launch session at Trinity Beach State School (Jeremy and Isaac’s primary school). Eleven students launched their model rockets.
Cairns Post came along and photographed the event. It went quite well.
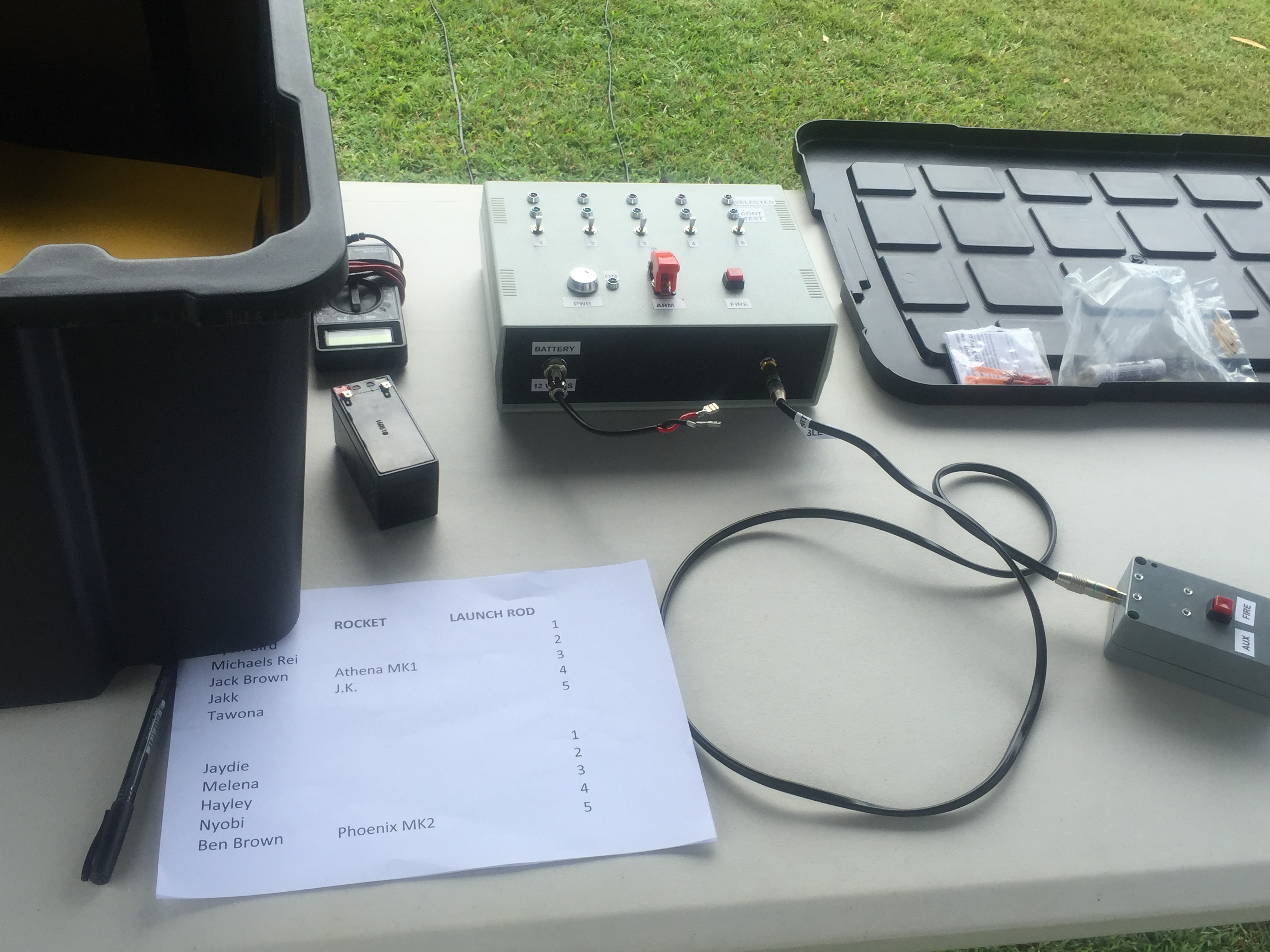
Joe Readying the rocket. Jeremy checking the rocket launch deskRocket Launch Controller and list of rocketeers and the rod they are on.Close up of Joe setting up the rockets – inserting igniters
I’ve been working hard on a model rocket launch system, on the side. The system has the following specs:-
Launch up to 5 rockets – indivdually, or combination
1/8″ diameter launch rods, Height ~1.5 metres from blast plate
12 volt power Supply
Key operated On/Off switch
10 metre cabling (from controller to rockets)
Loud Siren for Arm position
Continuity test
See the pictures below. Here I wanted to go through the paces of setting it up. I put some Nichrome wire and confirmed that it went red-hot for each rocket. I also did a test with an igniter to confirm that the current during continuity test will not result in a fire. Didn’t expect it to because the current is so small, but thought it would be a good test nevertheless.
Launch Pad with a rocketLaunch Controller BoxController and Launch pad
I’ve started construction of the weights that will be swung around by the Servos. They each have the following properties
Built from Steel Rod with diameter 50 mm
Thickness of 15 mm
Angular distance is 90 degrees
10 mm cut out from centre
Weight is approximately 46 grams each
A picture of these is shown below.
Weights for Stabilisation System
By having these weights positioned so that their curved edge is 26 mm from the centre of the rocket, we should be able to move the Centre of Gravity by 1.25mm. This will be a significant achievement if we can complete this payload. This will mean with a 100N thrust motor, we will get a moment of 0.125Nm. If the rocket has a Moment of Inertia of 0.25 kgm^2, then we are looking at Angular acceleration of 0.5 rads-2. This means that for a burn of 1.5 seconds in a vacuum, this would result in:-
Angle of Rotation = 0.5625 radians = 32 degrees
Rotation speed = 0.75 radians per second = 43 degrees per second
During tests on ground (in atmosphere), we would experience aerodynamic forces that would help to counteract this movement, so the effects would not be so great.
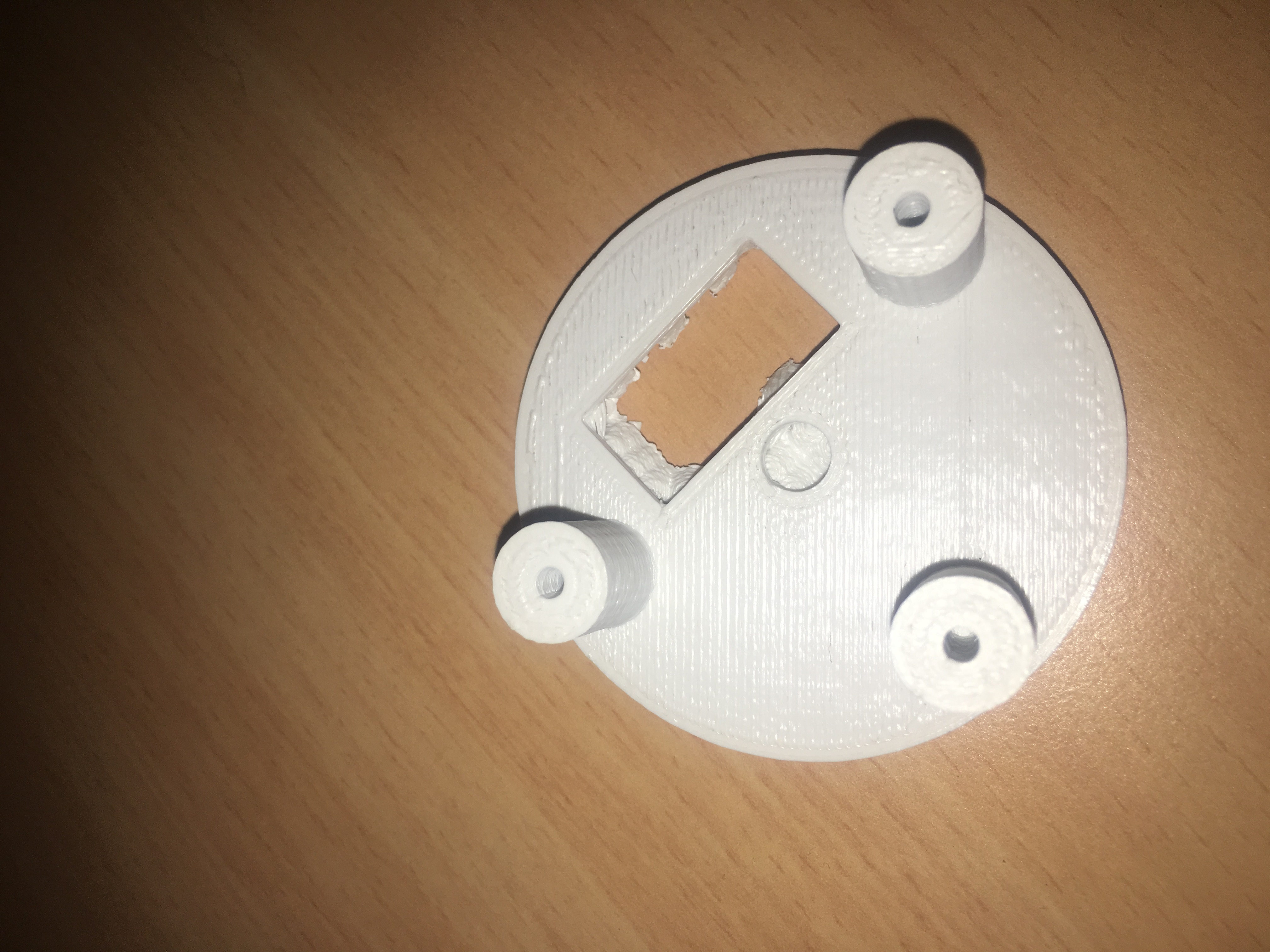
I’ve taken delivery of the sample prints that I designed using FreeCad. Fortunately the people who did them (Bilby3D) did two prints for me. One was printed on the side, one was on its circular base. One was done on the side because of the scaffold material in the horizontal print is a nightmare to remove. My first lesson in 3D printing!
Some pictures of what was produced below:-
Printed on side (Front view).Printed on side (Bottom view).Printed on base (Top view).
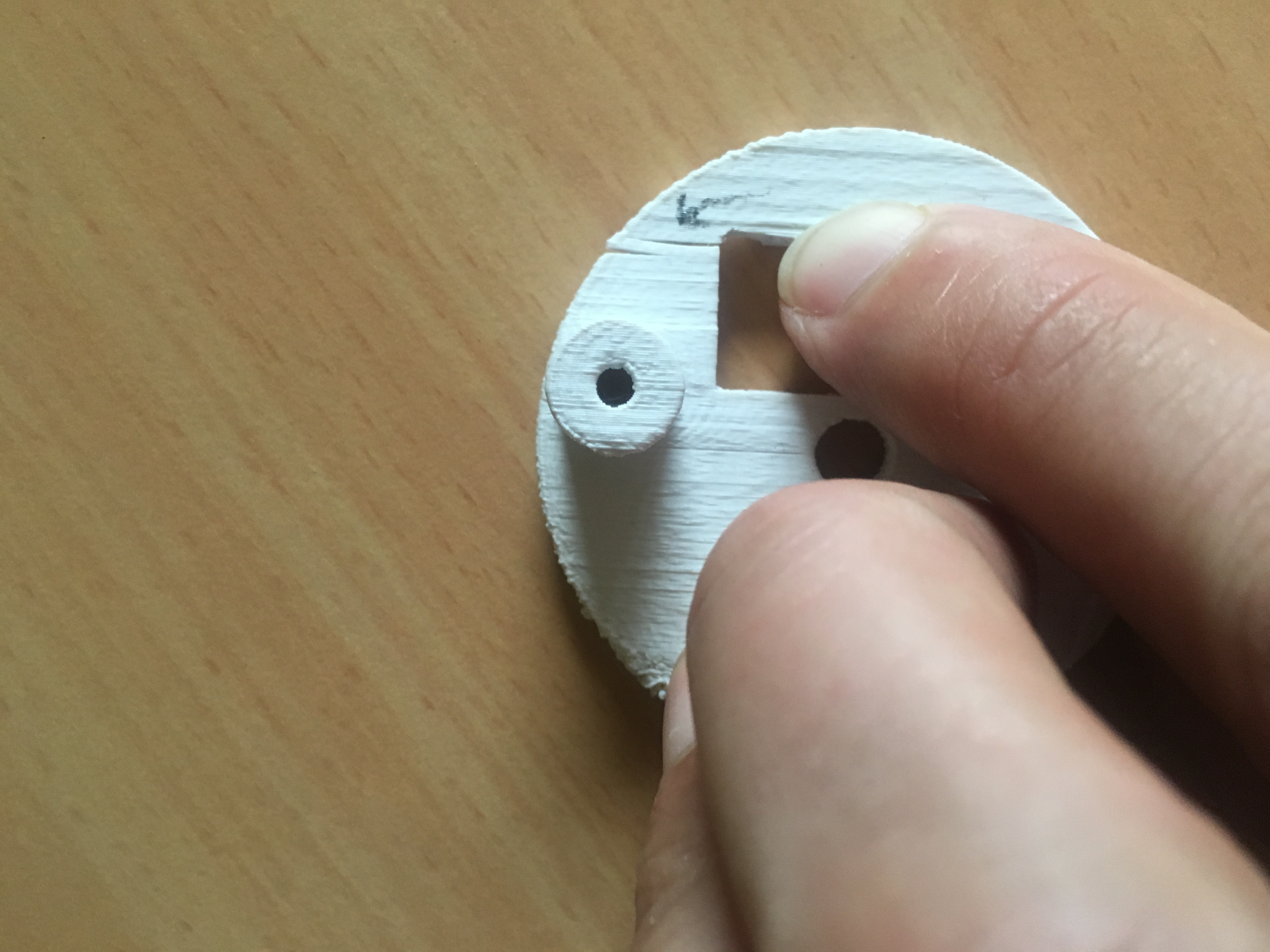
We started to remove some of the material to try and insert the servo. I mis-judged the amount of material that had to be moved to allow it to fit. I didn’t remove enough material and the 3D print cracked near the narrow edge.
Notice the crack in the pirint (where the arrow is pointing)
Of course the underlying issue here is that I did not take into account the shrinkage that occurs when a ABS printed object cools. ABS shrinkage is approximately 8%. (Shrinkage for PLA is about 2%).
So what I’ll be doing next is designing it with slightly large dimensions. What I’ll probably be doing is initially do a disc that is 8% bigger and make sure it fits inside the Air-Frame. Then I’ll use this contraction percentage to work out what I must multiply other dimensions by to get the correct dimension (after shrinkage).
I am also serious considering using PLA. Much more work to do.
In this post we focus our discussion on the device used to adjust the Centre of Mass. This device consists of two masses that we rotate independently to produce a resultant change in Centre of Mass. We split the masses in two to:-
Halve torques required to rotate them (if they were combined)
Allow us to obtain neutral position (by having masses opposite each other)
Allow movement of Centre of Mass around…by moving masses
Reduce movement of Centre of Mass by moving masses apart
This isn’t a new idea. We solved this problem with stepper motors. Unfortunately the stepper motors have problems. The are:-
Too heavy
Have insufficient torque
No means of verifying the position
Large current requirements
Require specialized electronics – Driver board
So I put some thought into how we could make this lighter and have greater torque. The only solution I have been able to come up with is a geared system using high torque servos.
The trade-off is that we can’t continuously rotate around. But this shouldn’t be necessary because we only need this system to operate for the first 1 to 2 seconds of flight. We do not expect the rocket to rotate about it’s Y-Axis significantly. Put another way, we don’t expect erratic motion, instead some clear rotation in one plane that requires some correction. There may be some rotation as the rocket builds up speed and the fins (with their imprecise alignment) results in some rotation about y-axis.
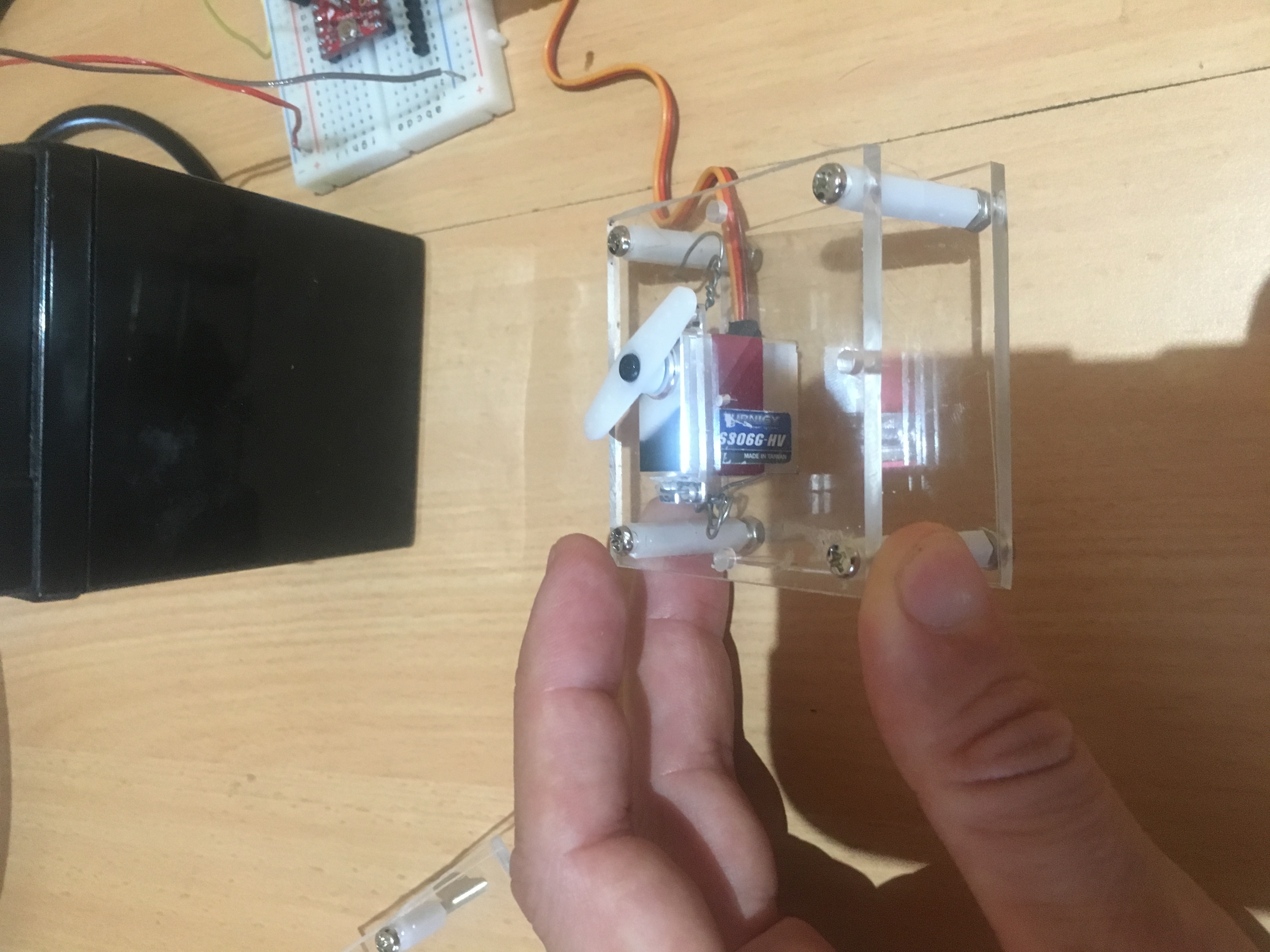
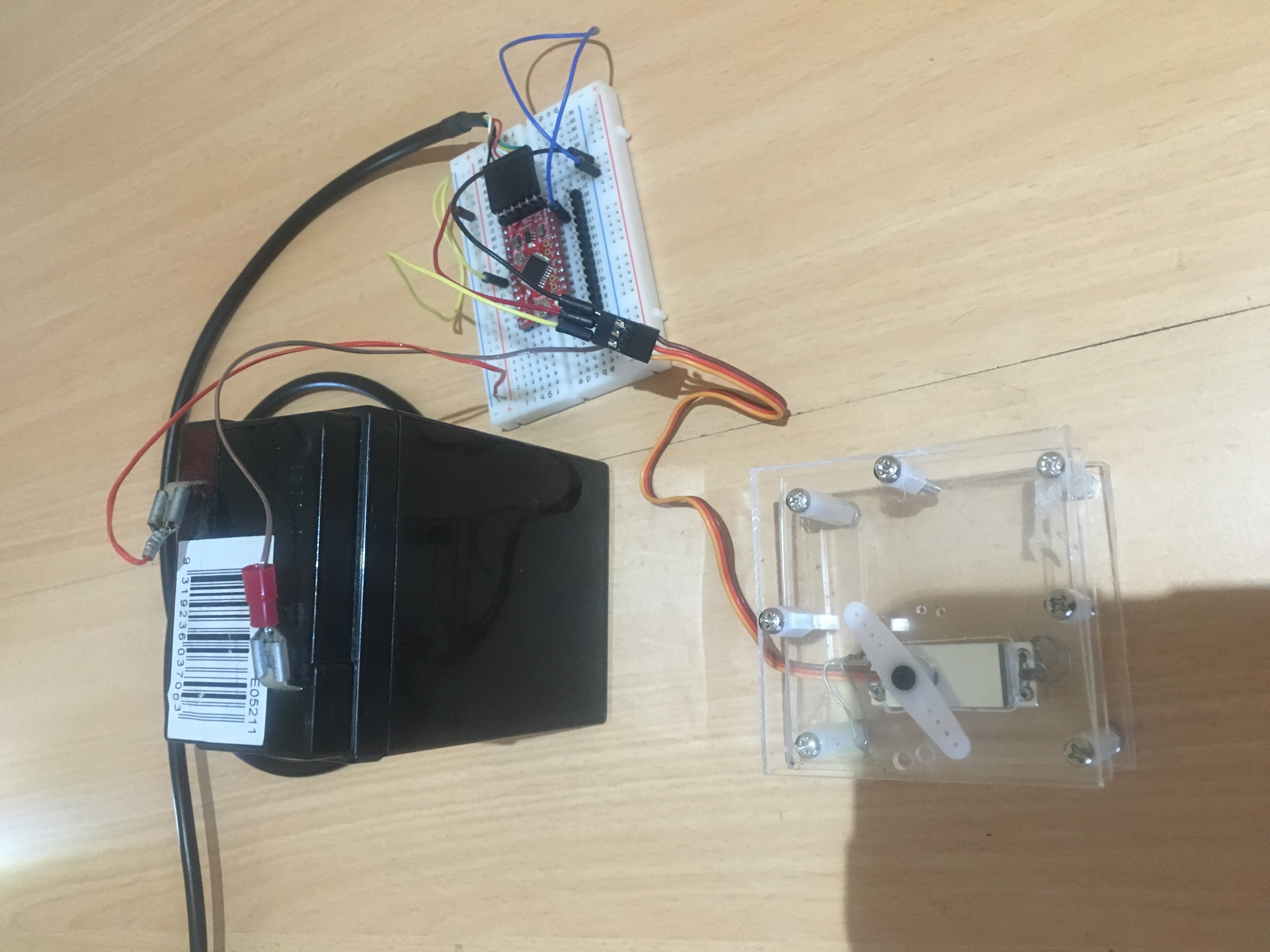
We have started work on a “pre” prototype system using Perspex. Below are a few pictures of system connected to Arduino.
Set-up without top perspex topPerspex framework with Servo, attached to Arduino controller
We ultimately aim to have 3-D printed components to form the framework. Below is a preliminary design for the bottom section that the servo is joined to.
[stl file=”framework_v0.02.stl” ]
We have ordered components from ServoCity. This looks like a very good supplier of quality components; certainly comprehensive. Below is a picture of the parts we have recently purchased.
All parts from ServoCity Used to construct mechanism
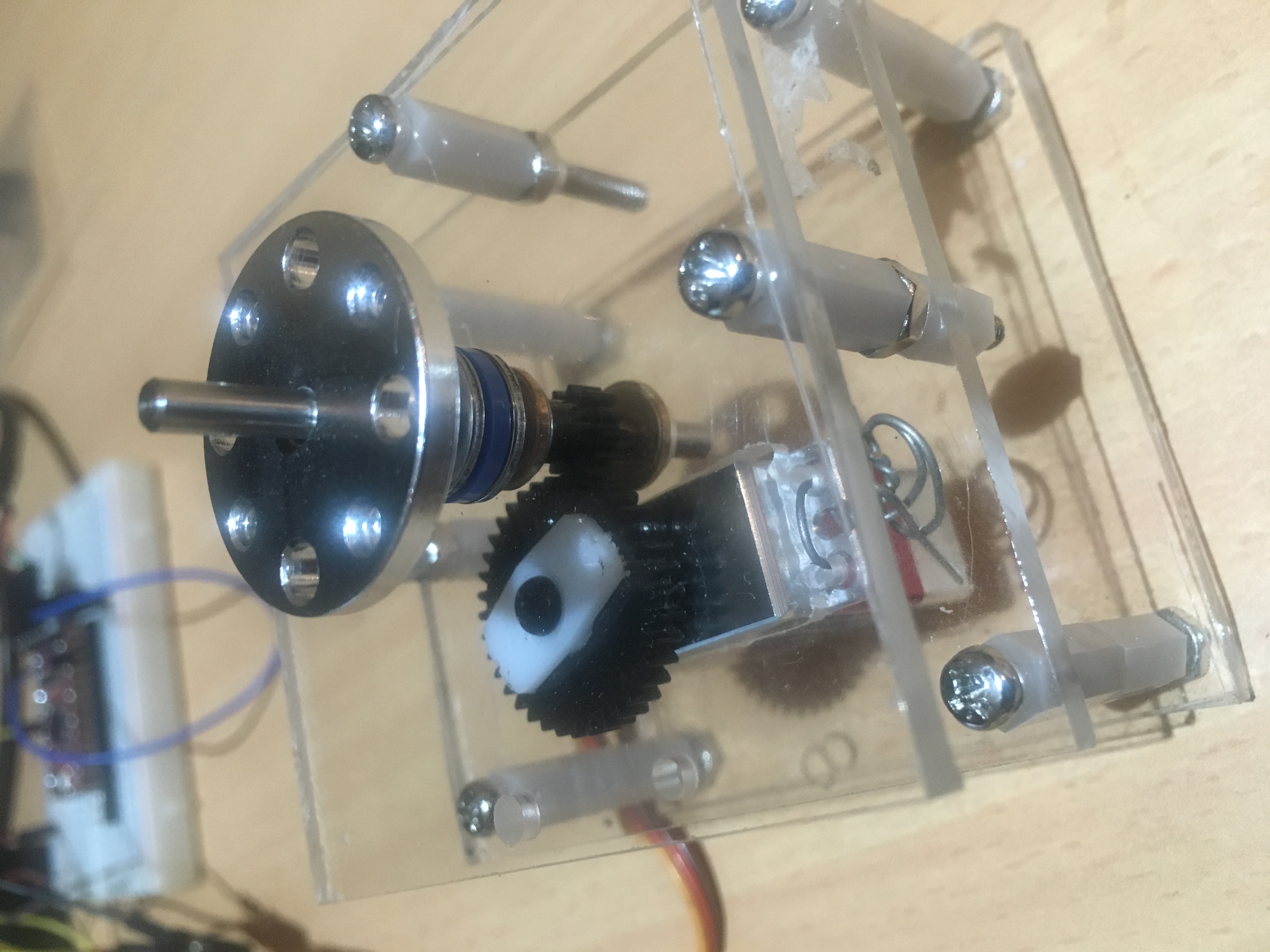
We had problems with the 48P 36 tooth gear. It was larger then the Spline on our Servo. So, I drilled out the servo gear carefully and then press-fit a Servo attachment into the gear (which I’ll later glue). Then I carefully drilled holes in the Perspex and press-fit the bushes. The final mechanism looks like:-
All components assembled.
The gear ratio is 3:1.
This means:-
Travel distance is now 3 x 135 = 405 degrees
Travel speed is now 60 degrees in approximately 0.017 seconds
Torque is reduced from 3.7kgf.cm to 1.23kgF.cm
We will ultimately look at adjusting the gearing,by inclusion of another 12 tooth and 24 tooth gear to give us a gear ratio of 6:1. Initial design work suggests that this should be doable. But for the purposes of the next flight test, we do not need to work on such a system. This system should be adequate for characterizing the effect of small movements of the Centre of Mass.
The only way to succeed is to not shy away from setting major goals. In particular, the next launch is going to build significantly on the previous launch. The goals of the next launch are to:-
Miniturise the PCB significantly
Use smaller ‘solder-on’ LIPO Batteries
Design PCBs, so they can be daisy chained. This is so that when we get our ‘five’ PCBs from the PCB manufacturer, we don’t use one and waste four. We would be using 2, or possibly 3 of the PCB in the next flight
Make the PCB more configurable/flexible in how they can be used.
Resolve issue with Air Pressure sensor
Utilise greater memory storage with i2c fRAM
Use a Accelerometer/Gyroscope (instead of just a gyroscope)
Utilise a system to swivel masses around using servos at 0.25 seconds into flight (after some of the motion has dampened down). We want to do this to measure the effect on the flight of the rocket…and so compare to previous results.
This is certainly a huge leap, but not unobtainable. There are many independent parts…some might succeed, while others might fail. So there is sure to be some success, somewhere.
We would need to use a 3-D Printer to turn this into reality.
We are initially going to do a mock-up using Perspex and some electronics in a breadboard. We will initially concentrate on the Servos and their ability to move quickly and consistently. If this works okay, then we will go about :-
Designing a special case PCB
Purchasing a 3-D Printer to create the mechanical device
Below is a screenshot of the design inside Blender.
Servo controlled system with electronics boards pulled to left/right. Servos are green, gears are red.
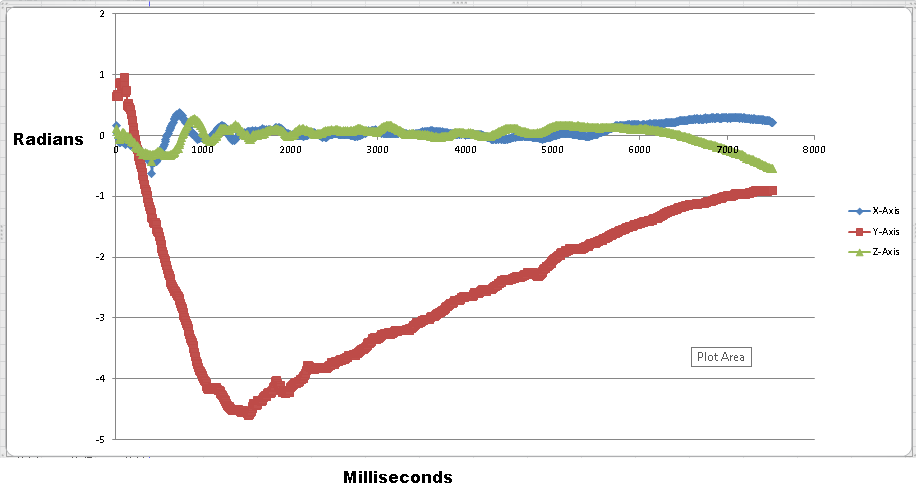
Below is a graph of the gyroscope results for nearly 8 seconds of flight.
Rotation of rocket during flight (up until Apogee)
We can make a few statements about this plot.
The rotation was anti-clockwise along y-axis (up) when looking up.
The rotation sped up until about 1.5 seconds (until the motor stopped running)
The whole rocket started to lean over in its flight at about 6 seconds, which is the approximate time required to get to Apogee. (We had our ejection charge to ignite at 6 seconds).
I have a feeling that ejection probably occured later then what I wanted, even though it was supposed to happen at ~6 seconds. I say this because I would have expected a bit of a spike in data as the rocket gets ‘kicked’ around a bit during ejection.
This is suspicion is supported by the video taken by the on-board video. There is a sudden loud sound and jolt from the camera at ~9 to 10 seconds after launch. This would be approximately 1.5 to 2 seconds after the data points above.
So this is very interesting and helpful for future work!
I quickly performed some ‘shake’ tests of the payload on the desk. I managed to get a test run which generated NO Air pressure and temperature measurements!. Then next time I turned it on, it froze up when trying to detect the air pressure sensor. Not good!
So I decided to pull the system apart and check out clearances between the air pressure sensor and surrounding electronics. The components are very close indeed. I proceeded to put some sticky-tape on both sides of the sensor to reduce chance of touching electronics on either side.
I have performed the shake test (quite violently) twice now without any issues, so I’d say that the close proximity and the vibrations in the rocket caused a momentary short. I was lucky that the Gyroscope measurements still worked
Fixes I’ll be looking at putting in are:-
Minimum gap between components – 2mm
Components supported opposite header pins for breakout boards.
Programming of circuit to timeout if it has issues connecting/talking to a component.
In any case, we’ll be completely redesigning the PCBs. So these problems will be resolved then.
We finally launched the Model Rocket “JAJI Aerospace” again. It nearly didn’t happen!
We hope you find this interesting and inspiring.
Launch Issues
The Electronics performed perfectly, but the igniters and the pyrogen on the tips refused to ignite the motors. So eventually I needed to use a Copperhead Igniter from my spare G76-10 Motor Kit to get the rocket launched.
Data
The Air Pressure/temperature measurements didn’t work. No idea why this didn’t work. Tests in the office and running up the hill worked. Very strange.
Gyro data was produced and is downloadable (unprocessed) from:-
I then process this file data.csv with a Java 3D app to generate an accurate real-time depiction of the Rockets rotation during flight. The data only goes for 8 seconds…right to the point of Apogee.
Feel free to download and use this data.
On-board Camera
We had an on-board camera taking footage. I’ve created two YouTube videos. One is the original footage (un-edited). The second is one slowed down by a factor of 8. At approx 3min and 10 second mark, you will see white spots on the ground. These are people (us) watching the launch. If you look carefully you will also notice the rocket dangling down and the rocket exhaust trail.
Ground based Camera
We had a Canon G12 camera rolling away on a Tripod about 20 metres away. I’ve uploaded a Youtube video showing this launch.
Future Improvements
There is a lot we can do to improve the launch. These points we will be focusing on are:-
Work out a more suitably sized parachute (While the recovery all went well, I think with the extra payload weight, a slightly bigger parachute would have been better).
I need to practice the installation of Copperheads a bit… I think.
And I need to figure out why the air pressure/temperature sensor didn’t work.
Work out a better camera system…and one that takes movies looking down…with a wide angle lense.
Figure out what type of igniter I can use (with reasonable chances of success) with the remaining G76-10 Motor.
Experiment and determine why the air pressure sensor did not measure any values.