The Centering rings are what we use to attach the Motor Mount to the Air-frame. The Centering rings provided did not fit the Motor mount, too tight (this is not bad). So I very carefully sanded them down by hand, as evenly as possible. Every few minutes I would check to see if they would fit. The top centering ring is notched, to slide over the Bridle cord. So I marked the top of the Motor mount as ‘Top’. And I marked the bottom of the Motor Mount as bottom.
Eventually after about 30mins of patient sanding I was able to slide both centering rings over the Motor Mount.
I’ve already started building the Avionics bay, admittedly a little early in the steps, but decided that it would be good to see how it fitted in with everything else. There was a bit of gluing here, but decided that constructing parts of the Avionics Bay is not going to stifle the remaining construction of the rocket.
Markings on wood tray to help with alignment of the brass tubesMaking sure everything lines up well.
Roughing up the wood to ensure really good glue joint.Brass Tubes araldited to the wood
I wasn’t terribly with the result of the tray. I should have laid down some tape to ‘restrict where some glue could go. I’m sure it would work (be strong enough), but from a cosmetic point of view – not good.
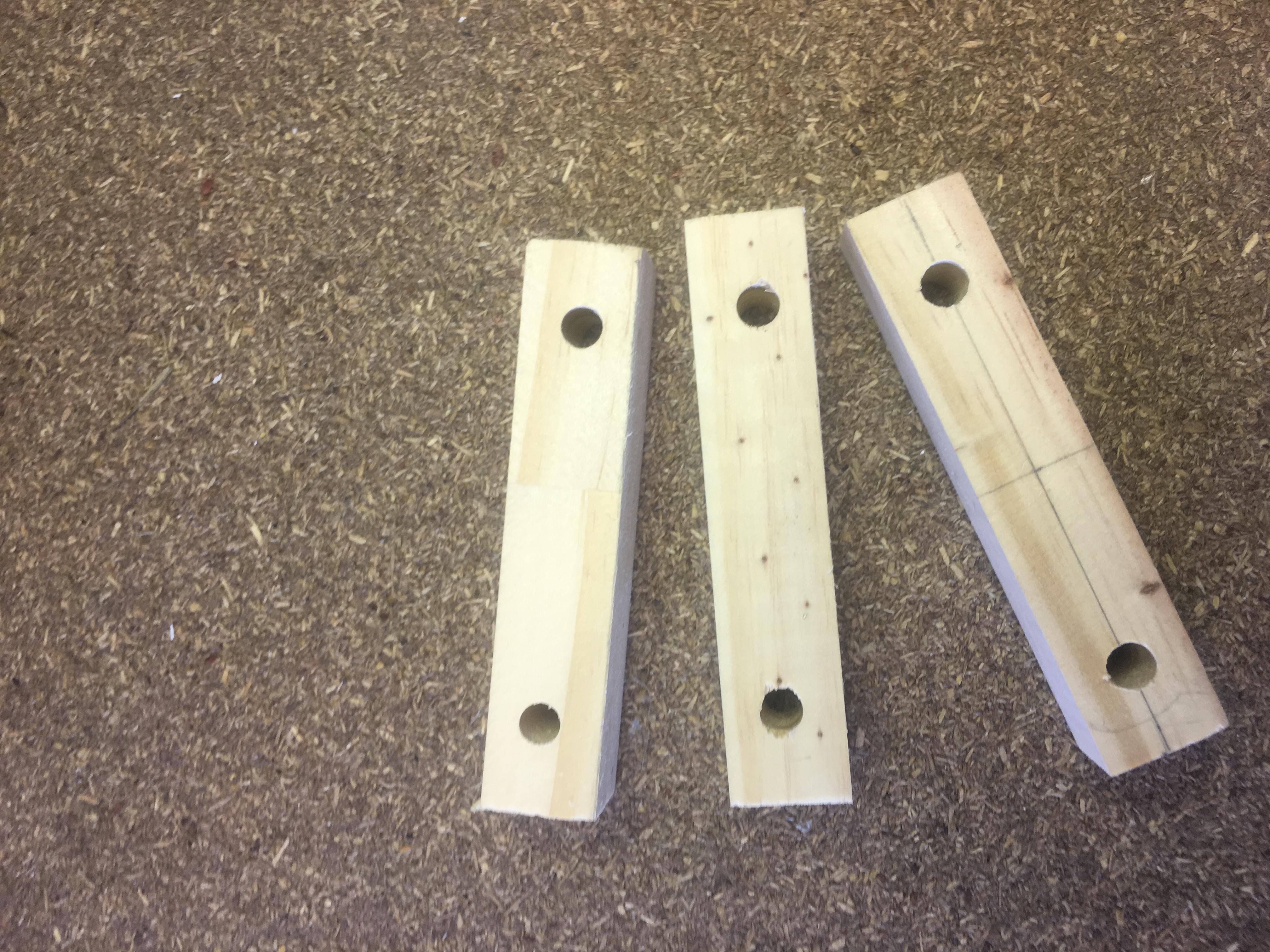
So, I’ve decided to make my own tray. See pictures below.
Wood pieces, all identical
I had to take extra care in creating these wood pieces. I performed just TWO cuts of three pieces sticky-taped together in a special decide to ensure that all the cuts would be square. Because I cut them altogether, this meant they were precisely the same length.
In terms of drilling holes, I just took my time and very carefully ensured the drill was level and the markings were as close as possible.
Tray cutout with markings for where wood is to be glued.
I’ve weighed all the components of the rocket. I’ve tabulated them below.
To identify which parts I’m referring to, I’ve included a picture of the components on the installation instructions.
Booster Airframe: 1494 grams
Motor Mount: 443 grams
Payload Airframe: 721 grams
Nose Cone: 349 grams
Nose Cone Coupler Tube: 222 grams
One Top Fin: 151 grams
One Bottom Fin: 113 grams
Bridle Strap: ~40 grams
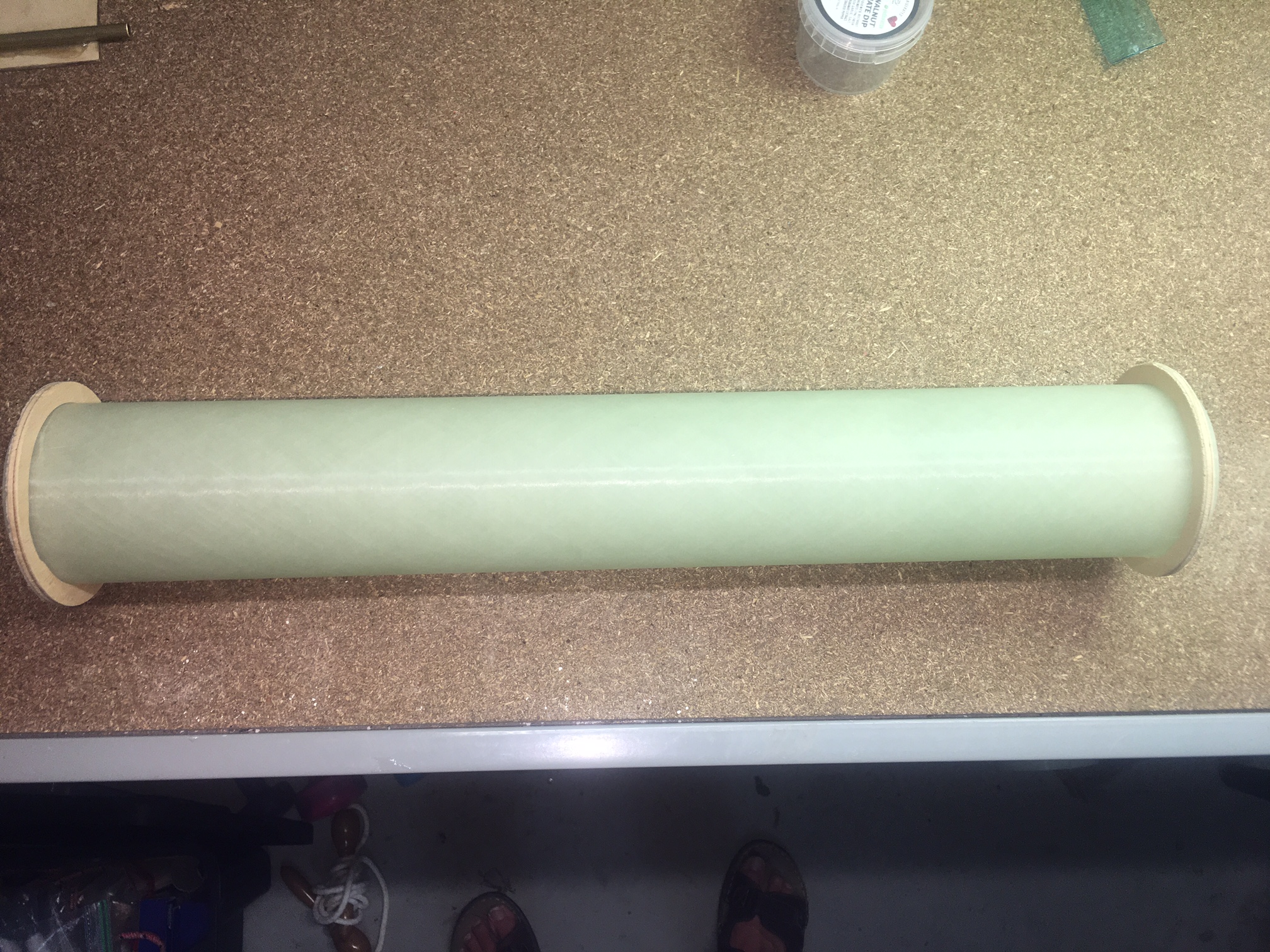
Avionics Bay Fibre-Glass (52mm length): 60 grams
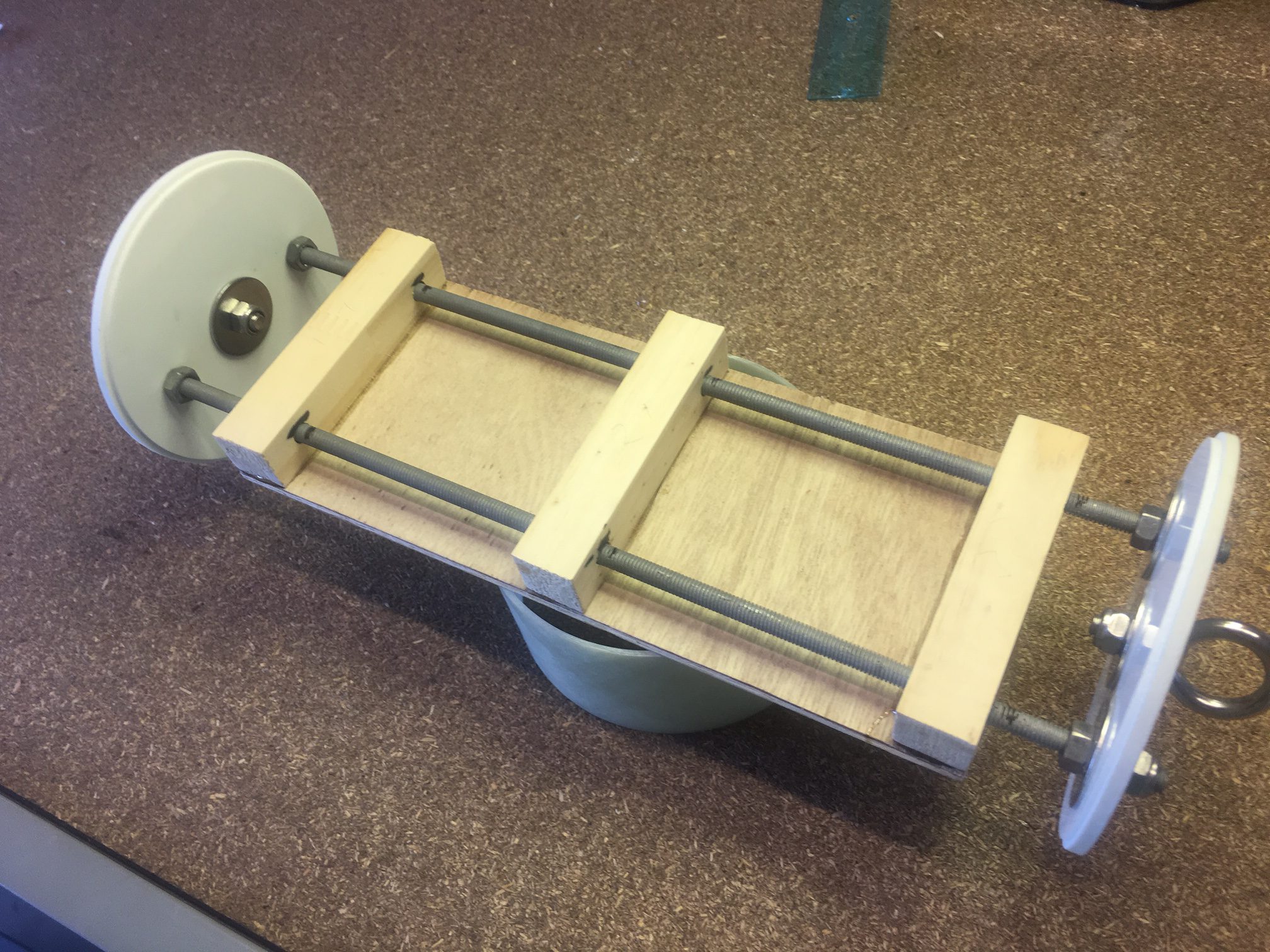
Avionics Bay (Wood + Bulkheads + threaded rod + nuts + washers + eye-ring bolts : 395 grams
Nose Cone Bulk plate + Eye Bolt + Nut: 90 grams
Avionics Bay Coupler (275 mm): 322 grams
Centering Rings (2 of these): 15 grams
We need to know these weights so that we can create a simulation file in Openrocket to simulate the flight of the rocket.
NOTE: I’ve opted to use a different sled arrangement in the Avionics Payload. Wasn’t happy with the one provided. The weights are almost the same, just a few grams lighter.
I have finally purchased and received my L2 rocket parts; a kit called Katana 4 from AusRocketry. It is a fibreglass kit, 4″ suitable for J, K and possibly L motors. I’m going to take my time making this one, making sure I get all the joins really well done, the holes in the right place, the paint just perfect!
The first step has been to identify all the pieces.
Main components of Katana 4 laid out. Measurements included.
Well, not quite all the pieces, but some of the main ones. I will get myself a weigher (previous one stopped working) so I can get the individual weights. Then i’ll be able to create myself a simulation file in OpenRocket and work out how it will perform.
The second step has been to clean them up, vaccuming off dust and wiping any residual dirt. . See some pictures below.
Cleanliness is very important. We want to reduce chance of dust getting in the places we don’t want it, e.g. Gluing, painting
Here are some other pictures to put the rocket into perspective.
The rocket stands approximately 2.4 metres and has a diameter of just over 100mm.Jeremy and myself holding parts of the rocket.
I quickly performed some ‘shake’ tests of the payload on the desk. I managed to get a test run which generated NO Air pressure and temperature measurements!. Then next time I turned it on, it froze up when trying to detect the air pressure sensor. Not good!
So I decided to pull the system apart and check out clearances between the air pressure sensor and surrounding electronics. The components are very close indeed. I proceeded to put some sticky-tape on both sides of the sensor to reduce chance of touching electronics on either side.
I have performed the shake test (quite violently) twice now without any issues, so I’d say that the close proximity and the vibrations in the rocket caused a momentary short. I was lucky that the Gyroscope measurements still worked
Fixes I’ll be looking at putting in are:-
Minimum gap between components – 2mm
Components supported opposite header pins for breakout boards.
Programming of circuit to timeout if it has issues connecting/talking to a component.
In any case, we’ll be completely redesigning the PCBs. So these problems will be resolved then.
This post is a little late, but still worth getting out.
On the 10th of January 2016, myself, Anna, Jeremy, Isaac and “Grandpa Val” travelled to the Goldcoast to attend a Queensland Rocketry Society Launch day. We all got to fly a rocket! Even Anna did!
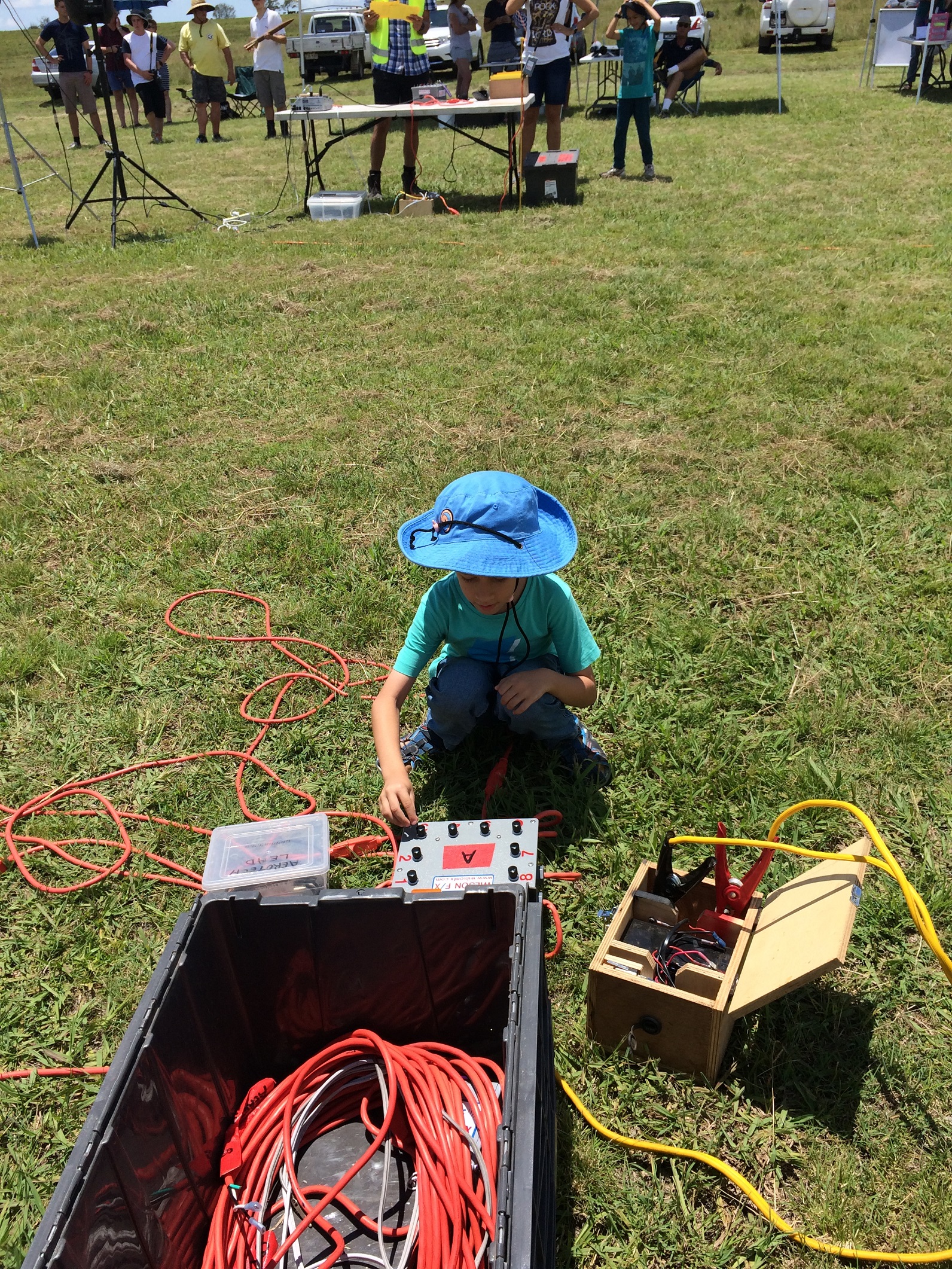
Isaac’s Rocket
Isaac flew a Small 15 Gram model rocket with a B-Engine. He was initially very scared of the noise and wanted to sit further back with the cars. Eventually he got the courage to participate in the rocket launching. Very pound of you Isaac!
Here are some pictures of Isaacs rocket and the boy himself!
Isaac hecking the continuity of his rocket launch line
Isaac’s rocket is one with blue nose coneIsaac with his GrandpaThree rocketeers!
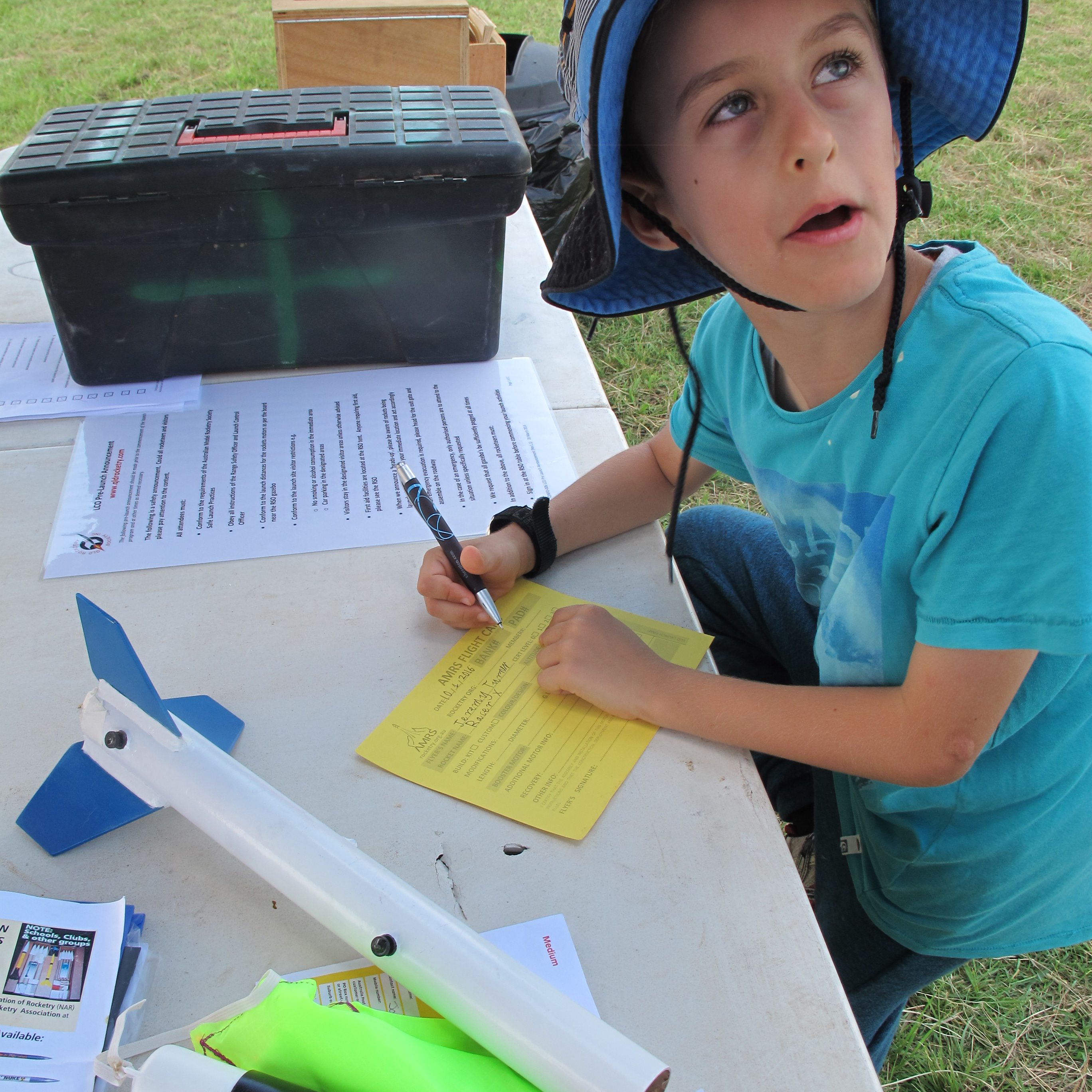
Jeremy’s Rocket
Jeremy’s rocket is an exceptional rocket for a first timer. This rocket had a D-engine expertly installed by Blake (Owner of Ausrocketry). It deployed its parachute perfectly! Lovely work Jeremy!
Jeremy with his rocket on launch padJeremy recovers his rocket – all intact!Jeremy filling out his launch card
Anna’s (Mummy) Rocket (UFO)
Anna couldn’t miss out on the action and launched a UFO rocket. This had a C-Engine in it. It flew really well!
Anna carefully setting up her ‘Rocket’ for launch.
Joe’s L1 Attempt
Well I decided to go for my L1. This was very exciting. It took a lot of time to set-up the engine, even though it was just a CTI engine! I was taking things very carefully. Didn’t want to make any mistakes.
Inspecting the business end.Jeremy standing next to my rocket where it landedFound my rocket. All perfectly intact and only about 100 metres from launch pad.Setting up the IgnitorReady for launch photo shoot.Successful parachute deployment
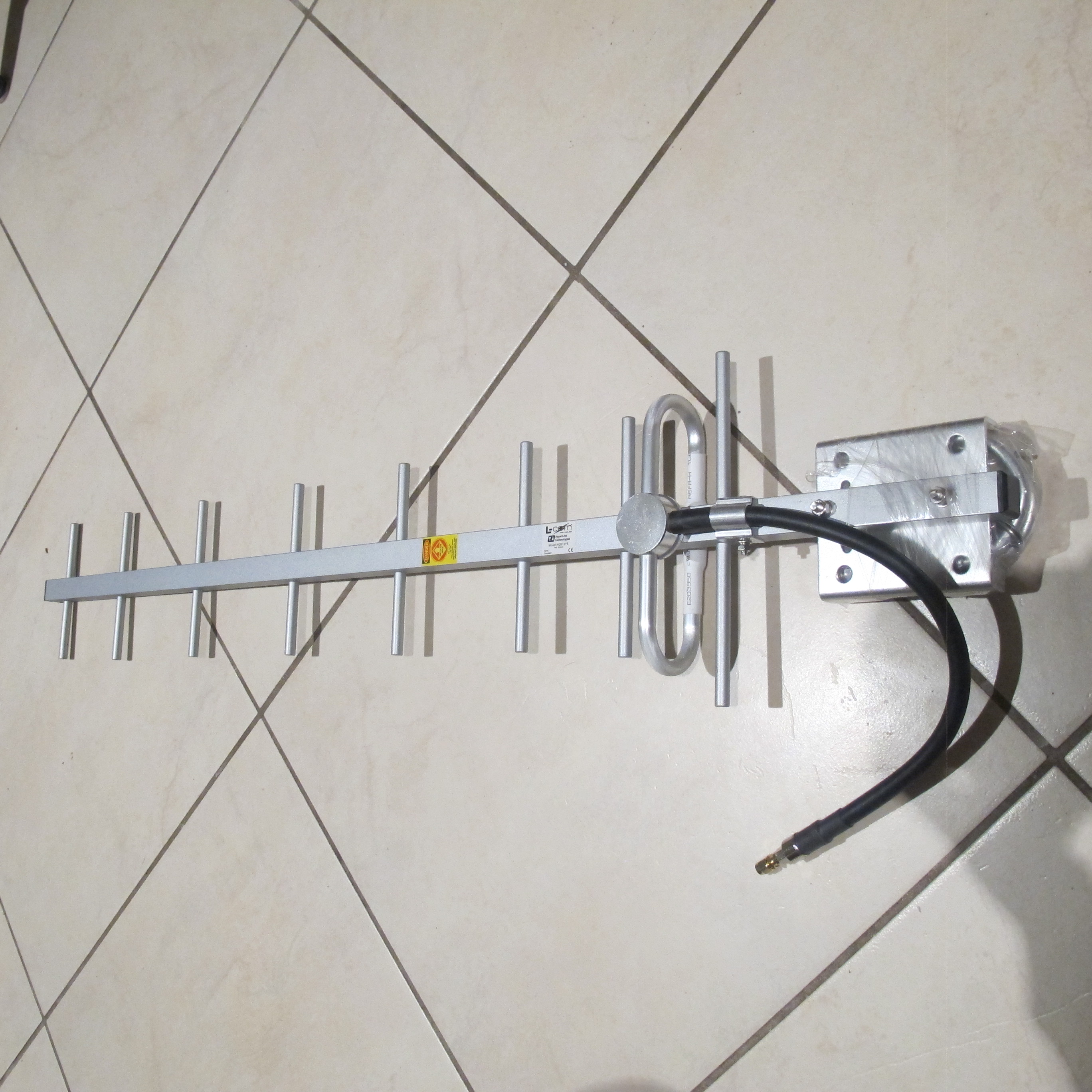
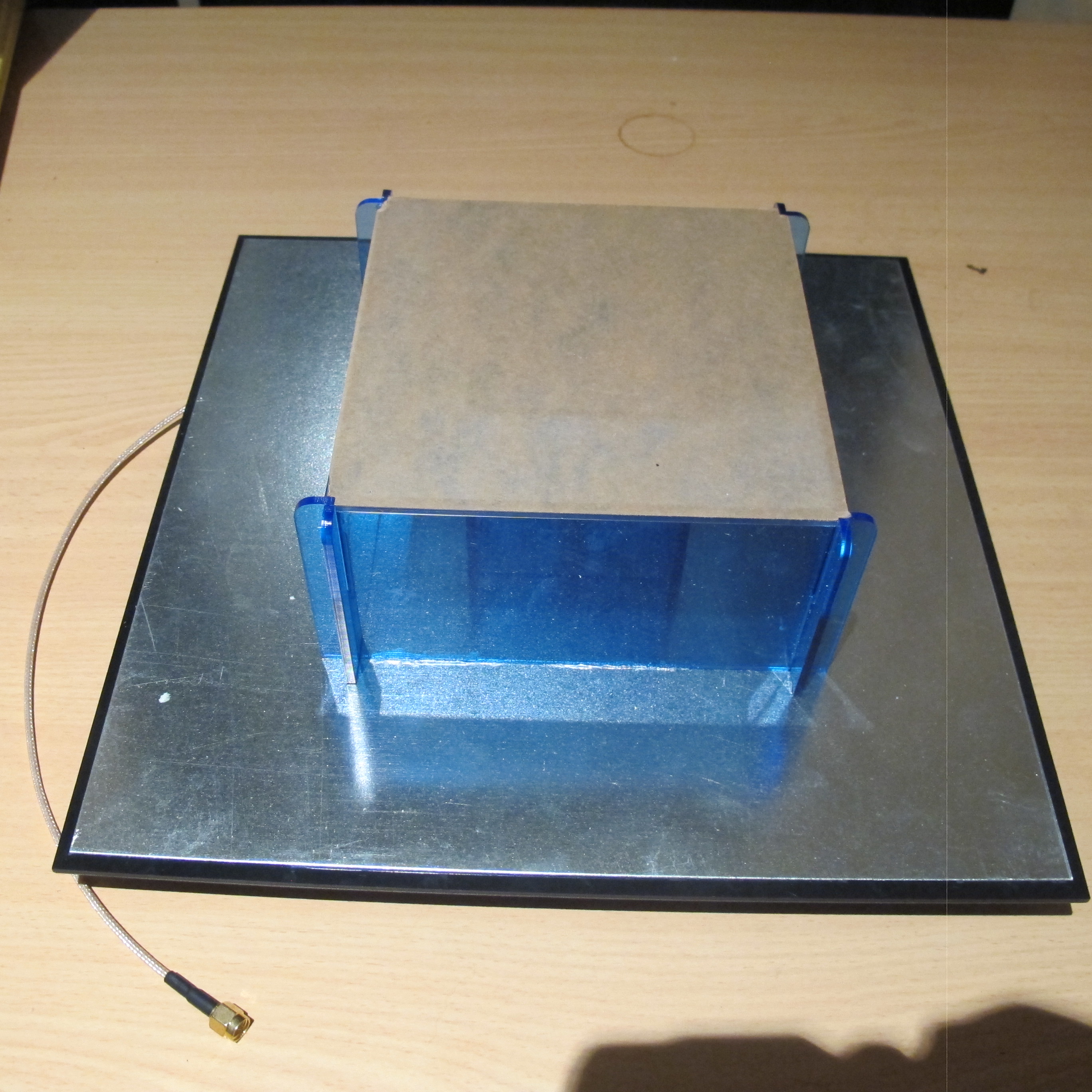
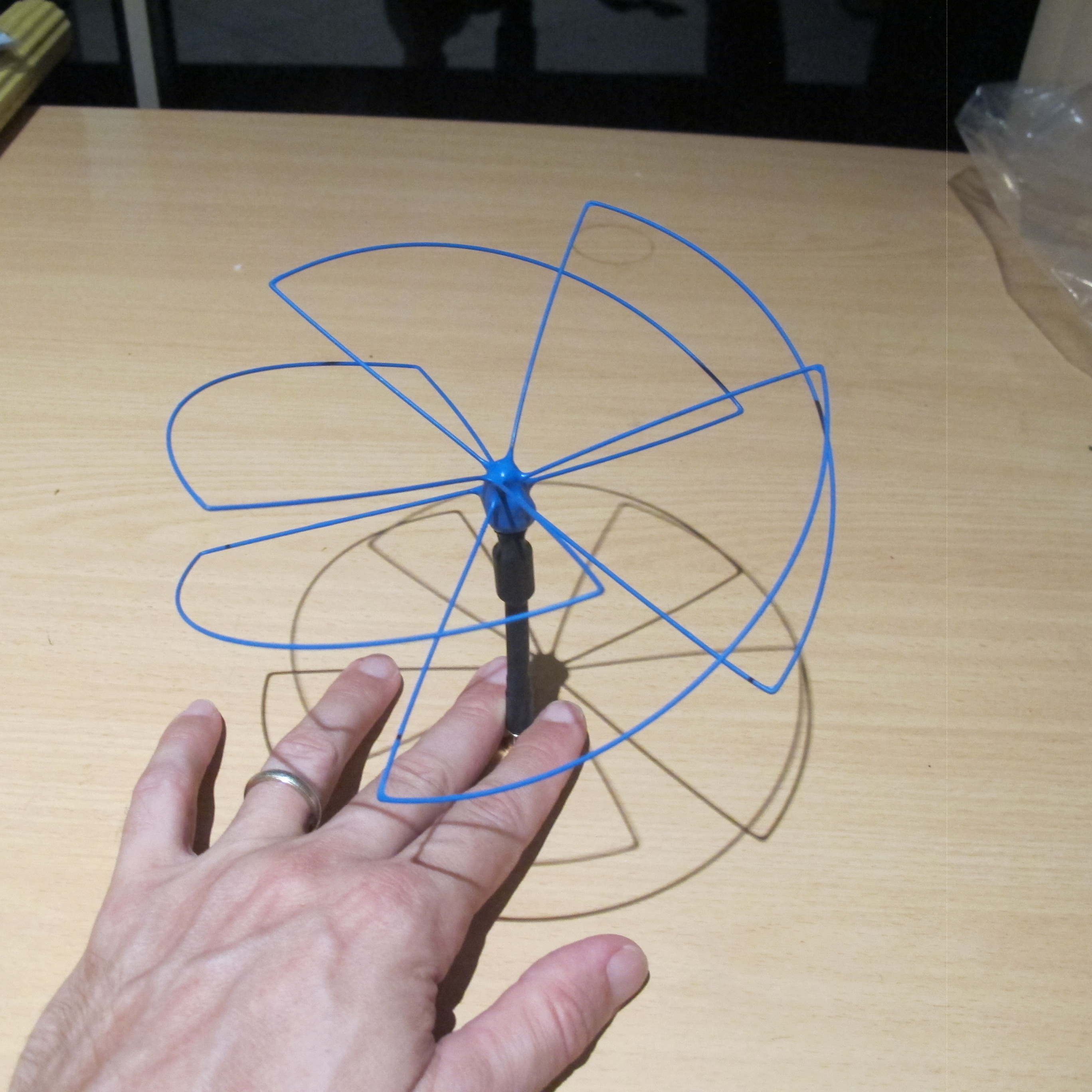
Several antennas have been purchased for the purposes of ensuring the most ideal long range solution is obtained. While it is clear that some antennas (like the Mad Mushroom) should have good performance, this antenna is somewhat fragile and may not be able to maintain structural integrity during high accelerations. For this reason, we may need to compromise between signal strength/range and antenna type/robustness.
Below are the antennas that have been purchased.
Parcel from ReadymadeRC arrived with Antennas in it.
IMU stands for “Intertial Measurement Unit”. It measures accerations, angular velpcity and magnetic field. From these measurements and with some clever Mathematics, we can calculate the orientation of a device in a Gravitational field (Earth) and the direction it is pointing in (using the Magnetometer).
Why do we want an IMU?
It is important to know what state the rocket is in:-
Immediately before launch – i.e. is its movement within prescribed safety limits?
During launch – i.e. what is the acceleration that it is experiencing, in what direction is it accelerating?
And after launch – i.e. how long is it in freefall? Has the parachute deployed?
This IMU will give us a very good idea of how it is behaving. The groundstation will receive all raw IMU data as well as pitch, roll and yaw and will save this to the local database. We have created several alerts that feed on this data to advise us of particular states. e.g. excessive rotation, acceleration milestones, freefall detection.
We will also have a 3-D representation of the rocket, so we can quickly picture its orientation and motion. Below is a Youtube clip of us testing out an initial release of the code. It works, but there is much to be done.
The IMU is not mounted in the normal sense, with Z up, X and Y in the horizontal plane. We have it mounted with positive X axis up instead. We expect the rocket to be predominantly in X axis. So we are low risk of Gimbal Lock. As it goes up we expect certain amount of swaying from this position. As it is accelerated, (for that few seconds), the acceleration will far exceed the gravitational acceleration, so the routines for measuring orientation will not be of much use. While the rocket is coasting, the IMU will detect ‘freefall’ state. We won’t be able to sense its orientation too well at this point. Once the drogue parachute is deployed we should get some good data on orientation…because the rocket/parachute will more or less be falling at a constant velocity.
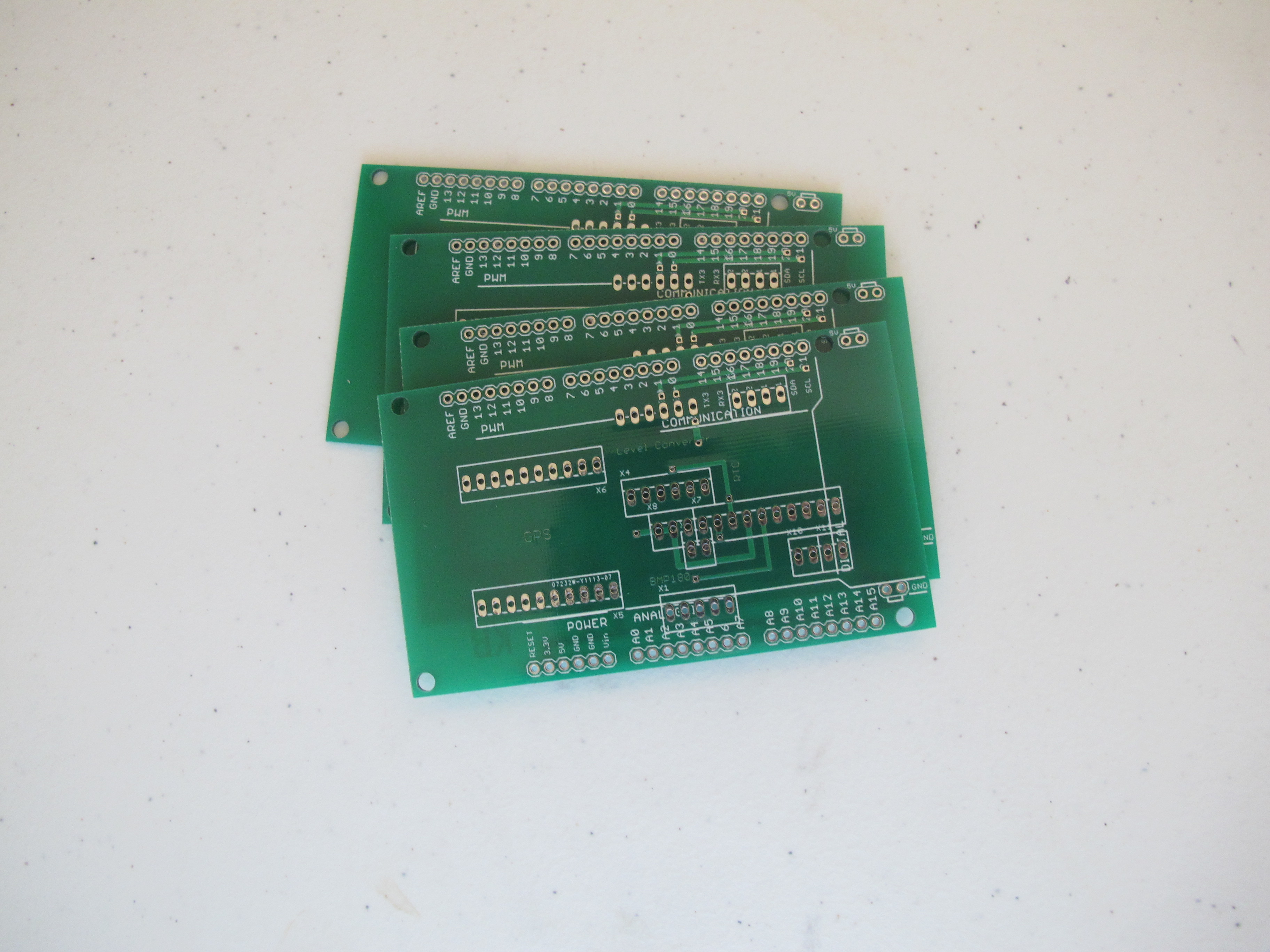
I have recently received the PCB sensor board from the supplier and have started soldering components. A few pictures of this are shown below.
Bare PCB – Ready for soldering
Five boards were received in total. (These are “prototype” boards and the minimum order quantity is five). As you can see, the quality of these is exceptional….much better than anything I could do at home.
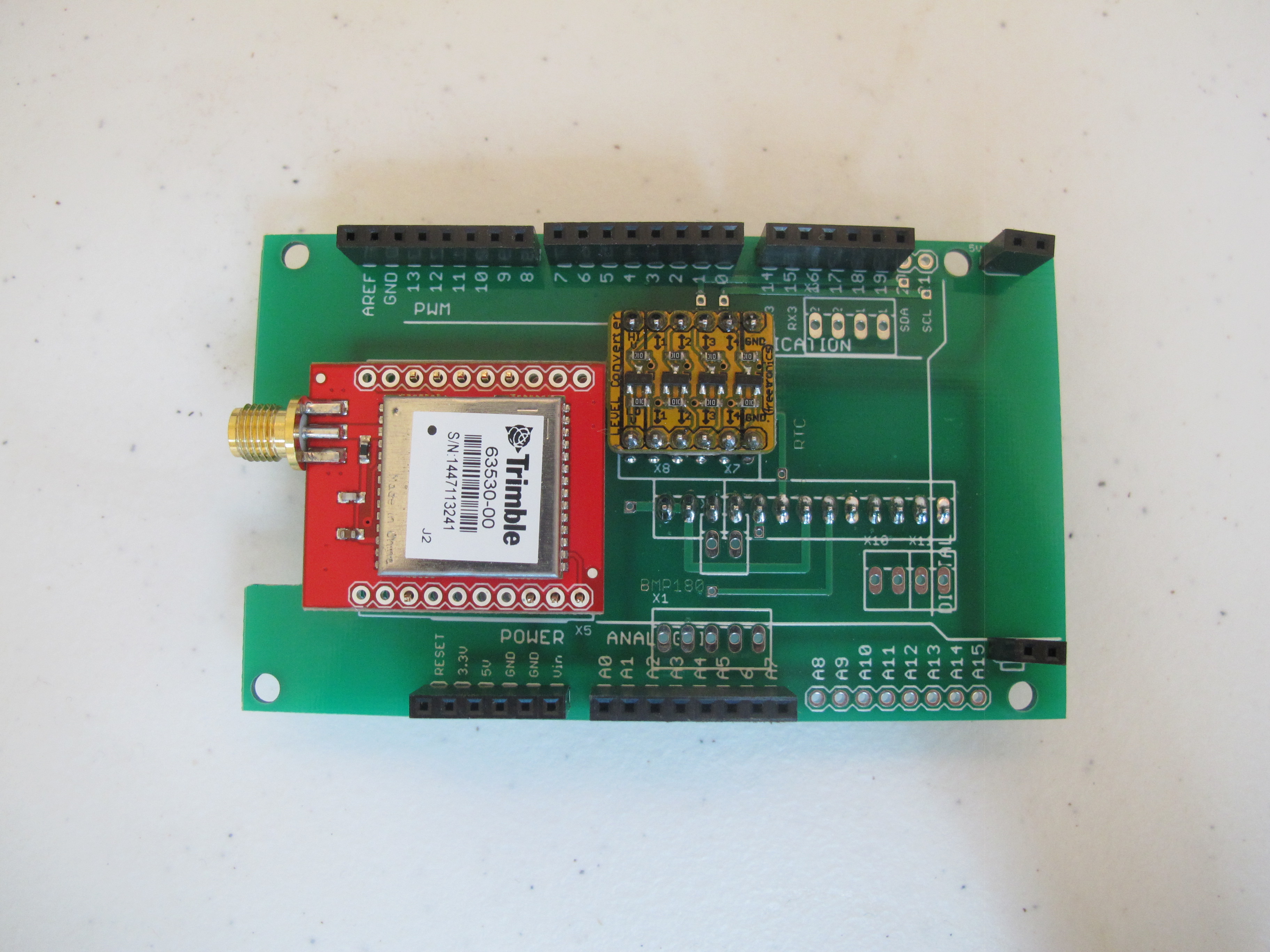
Top view: Some of breakout boards soldered on
Above is the GPS module (capable of operation up to 50km) and a Level converter. The Level converter is used by the GPS module and the IMU module. These two modules use 3.3 volts. The Arduino EtherMega operates at 5 volts.
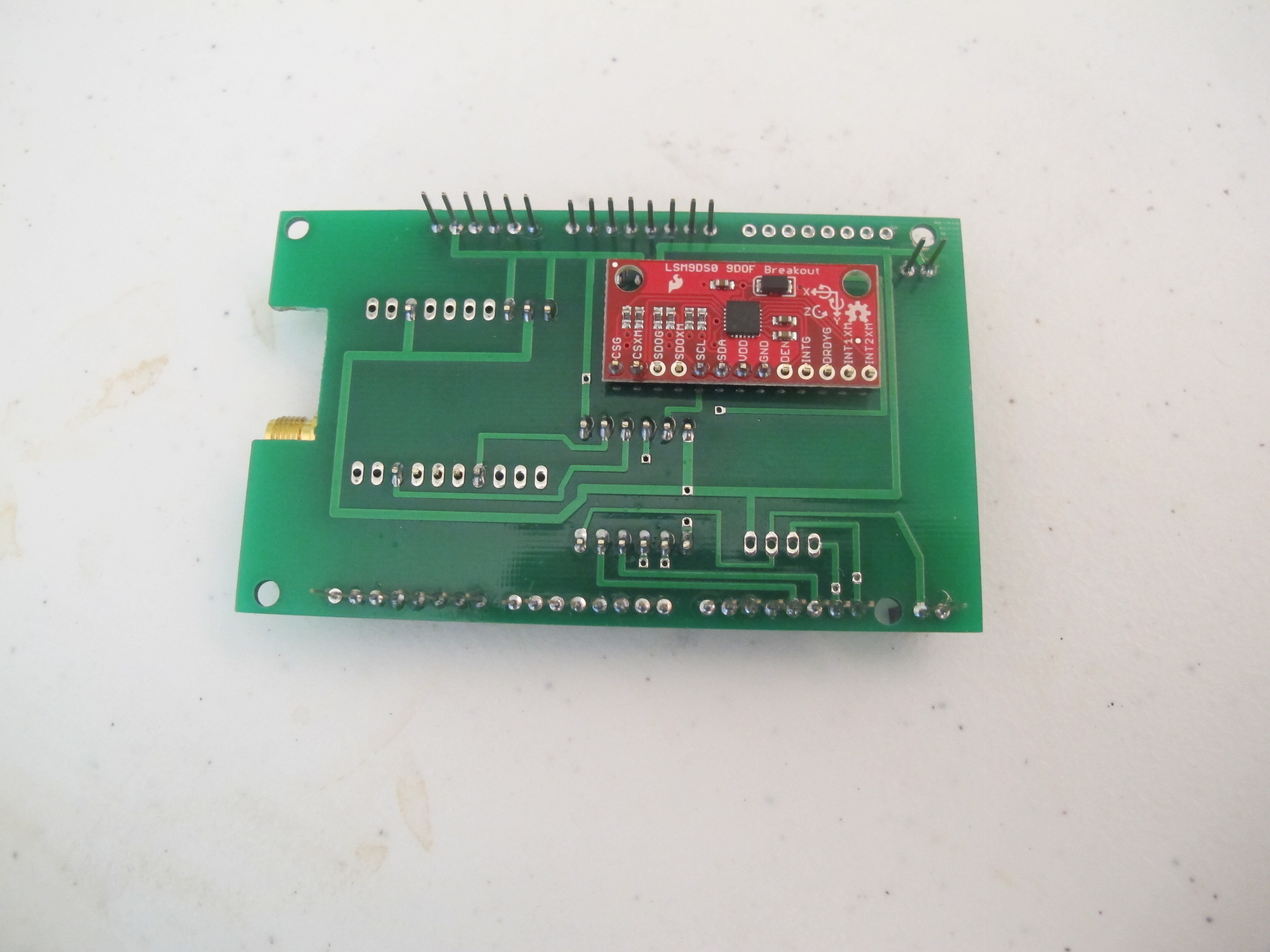
Bottom View: IMU soldered on
We put this on the bottom for space reasons. This just misses a few pins on the EtherMega by a few mm. So things are tight!
The REAL work beings soon…programming all these sensors. I expect the IMU to be particularly difficult.
We will start using this launch system for small Estee engines/igniters. So the first thing I wanted to do was model an Estes Igniter to find out how the battery would perform.
Below is a picture of a typical igniter.
Typical Estes Igniter
The resistance was measured to be approximately 3.5 ohms.
If we assume resistance of battery and wires combined is approximately 0.5 ohms, we are looking at a total resistance of ~4 ohms. With an igniter battry of 12 volts, we are then looking at a current of approximately 3 Amps. This is well below the maxiumum current the relays can take (5Amps) and the wiress, connectors should be able to handle this current.
NOTE: When we get the relay board made to replace the current prototype, we will get 2Oz Copper board produced…which should double the current it can handle.
We really wanted to measure the resistance of the battery and the power dissapated by the battery. We do this because want to be sure the battery is not under too much ‘stress’. We know it _should_ be able to handle this current draw. It is rated as 10c (8Amp) continuous dis-charge and Max Burst ate of 20C (16Amp) so it should have absolutely no problems.
The Battery we will use to ignite rocket igniters.
Nethertheless, we wish to understand its operation completely so that we are sure we don’t ignite the battery instead!
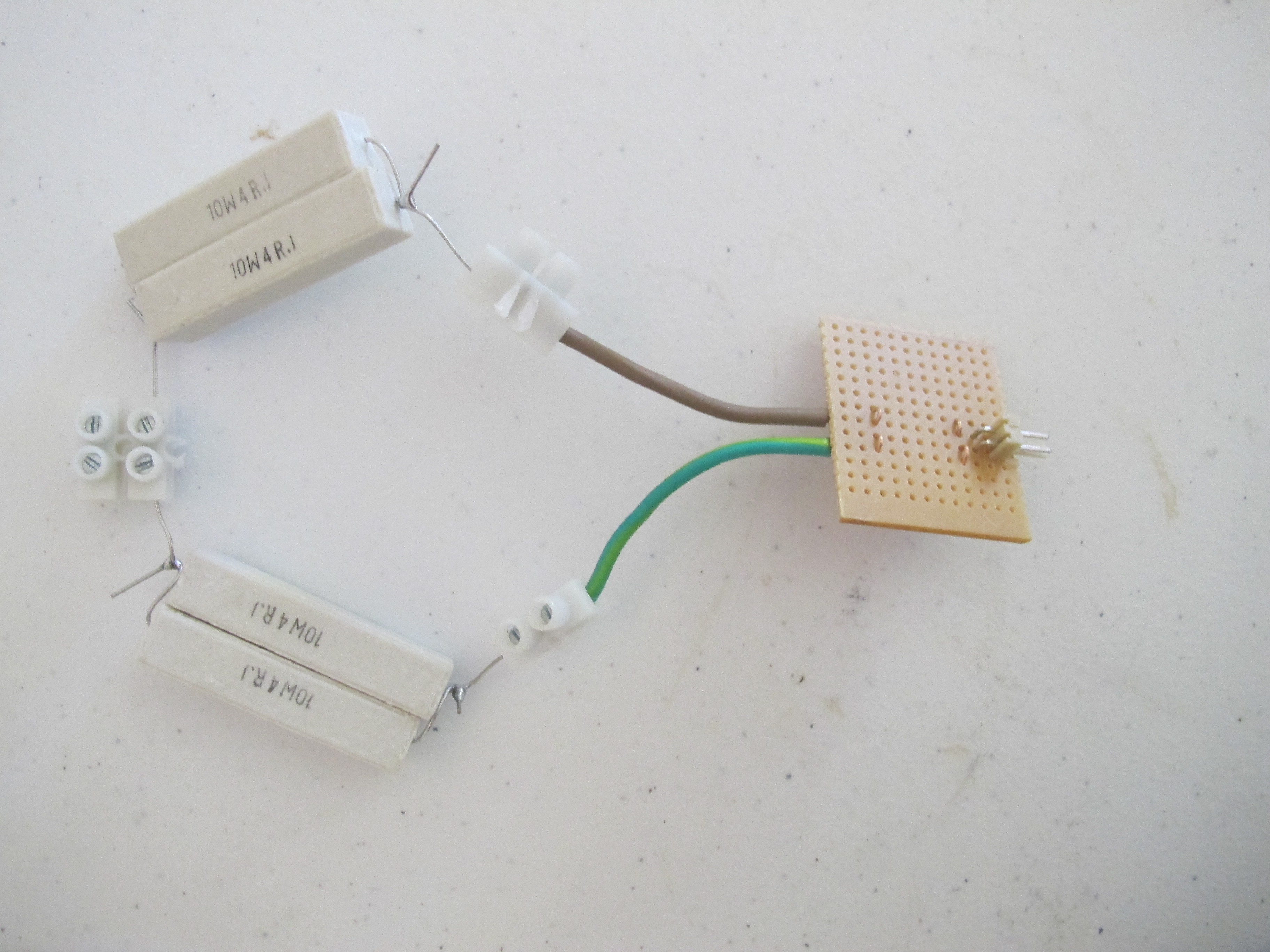
We decided to perform a small experiment to calculate the internal resistance when a current of 3Amps flows. Below is a picture of the test load.
Resistance load
Each resistor is a 10Watt resistor with a restance of 4 Ohms.
This means the total resistance of the load is 4 Ohms and it can dissapate a maximum of 40Watts (without exceeding specification of resistors).
We measure the open-circuit resistance of the battery and the closed-circuit resistance of the battery (when connected to the load). The values we got were:-
Vo = 12.15 V
Vc = 11.67 V
We then computed the internal resistance to be roughly 0.14ohms
So the power dissipated through the battery at a rate as shown below:-
P = VI = (12.15 – 11.67) ^2 / 0.14 = 1.6Watts
The power dissipated through the igniter is:-
P = VI = 11.67 ^2 / 3.5 = 38.9 Watts.
This is what we hoped for and expected. The igniter because of its much lesser mass should heat up significantly, exceedingly faster then the battery and ignite the pyrogen.