The Launch Electronics sole purpose initially is to provide a safe reliable means of launching our current model rockets. We could easily go for a wire based method with a box with some buttons…a very simple, but effective approach.
…However it was decided that this is not the best approach because we need to look at developing some of the technology required in later launches, including the Rockoon. We don’t wish to however build everything right now, but, but start building something that can be added and extended later. The High Altitude Balloon Electronics worked very well, so decided to draw from that.
The High Level Design
The solution will consist of three components:-
1. The End user device (ipad or iphone), which we will refer to as the Launch Console.
2. The Ground Station is the system the iphone/ipad connects to. The Ground Station will connect to the Remote Launch System via the radio modems
3. The Remote Launch System which will have all the necessary electronics to power, up, test, arm and launch the model rocket.
More information on each of these components is below.
Launch Console
The operator will only require an ipad which can connect to the Ground Station which will act as a Wirelss Access Point. The operator will be able to use a browser to access the Launch System Software.
Ground Station
This will be a small computer, looking at using a Rasberry-Pi 2 Model B. It will have its own RTC module, USB Wifi dongle and be connected to a RFD868 radio modem via serial. It will run PHP/Apache and use SQLLite3 database to store data. The systems used in the balloon launch used a BeagleBone Black. OpenStreetView was a bit sluggish, and so we hope/expect to perform a little better this time. with the Rasberry-Pi.
NOTE: Open Streetview is not required initially for our launch systems, but will be required later down the track.
Remote Launch System
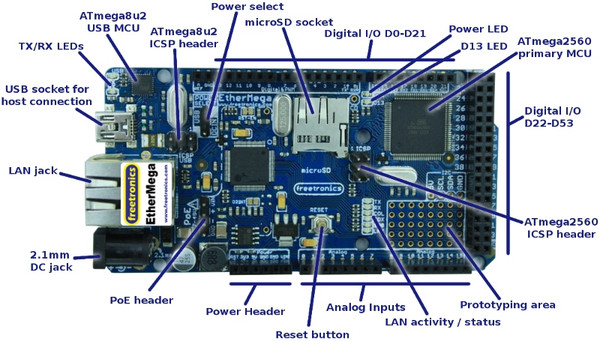
Using something light and something that isn’t power hungry and has lots of GPIO is very important. That is why we have decided to go for EtherMega 2560. A picture of this is below:-
Picture of controller used for Remote Launch System
We will initially create a single PCB with relays and Switch Mode PSU to power the relays and RFD868a modems. Later we will add another PCB (sandwiched in between) with GPS, RTC, Air pressure sensor and IMU and Camera.
Two PSU will be required, one to power the micro Electronics and another to power the Igniters.
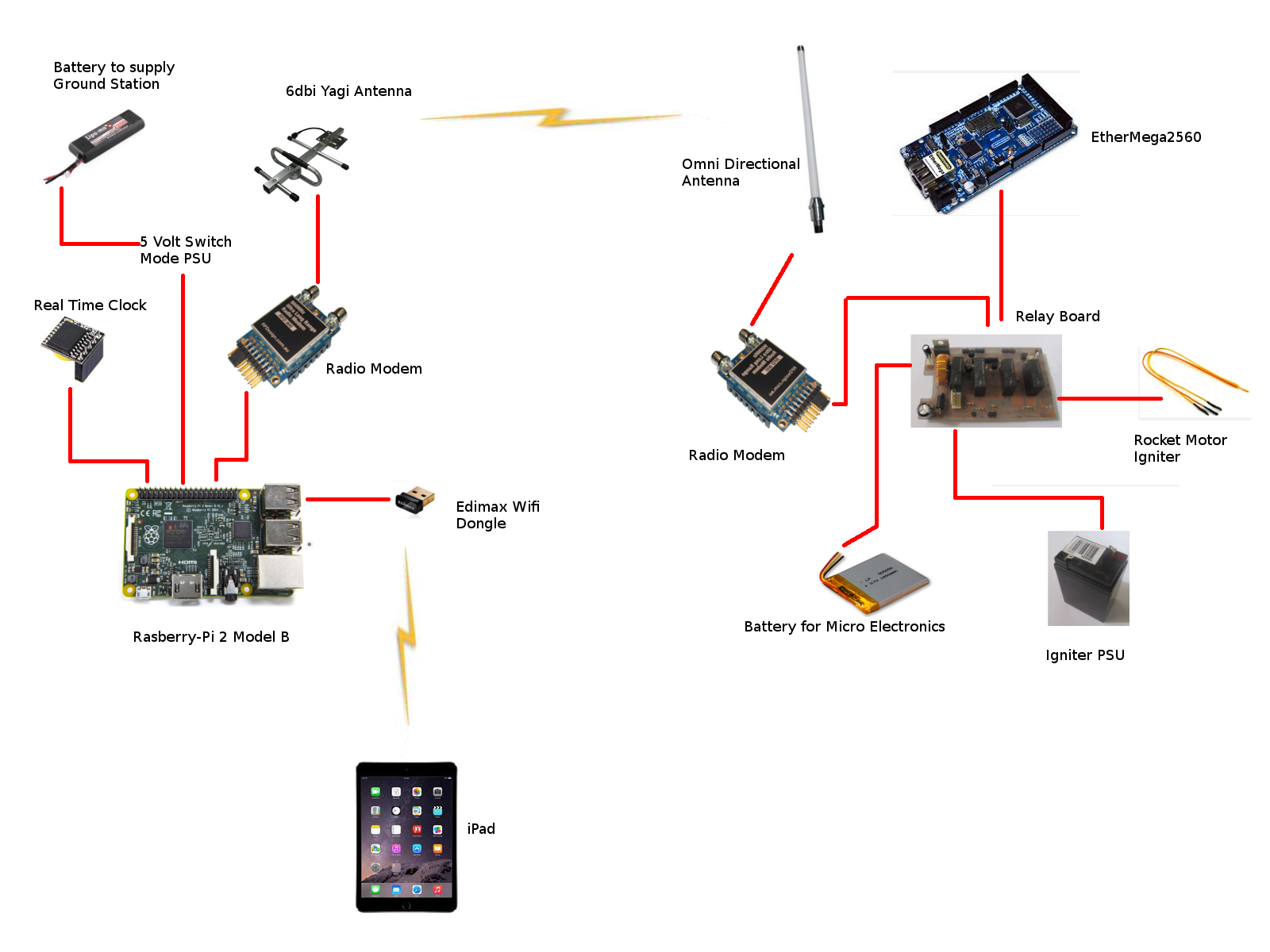
Below is a picture of how I envisage everything will ‘fit’ together.
High level design
Summary
One of the great things is that as we progress with bigger model rockets, the launch system will get more and more testing, which will help give us the confidence when the Rockoon is ultimately launched.
Just a short post to show the launch pad with the launch rail attached to the platform. It is a 2.5 m length of 1010. I still need to put in a blast deflector and a stopper for the rocket to rest upon. Here are some pictures
The platform sheet is particularly heavy and sharp and hence dangerous to handle. It is very easy to cut oneself on the edge of it. To deal with this, we have decided to attach 1″ square profile Aluminum tube. We have done this by cutting four lengths of tube and cutting out each end a 45 degree cut to ensure they connect together around the perimeter of the Aluminum sheet neatly. We pot riveted these square profile tubes to the sheet.
Pot rivets holding tubing on to sheet
Square Tube riveted to the plate
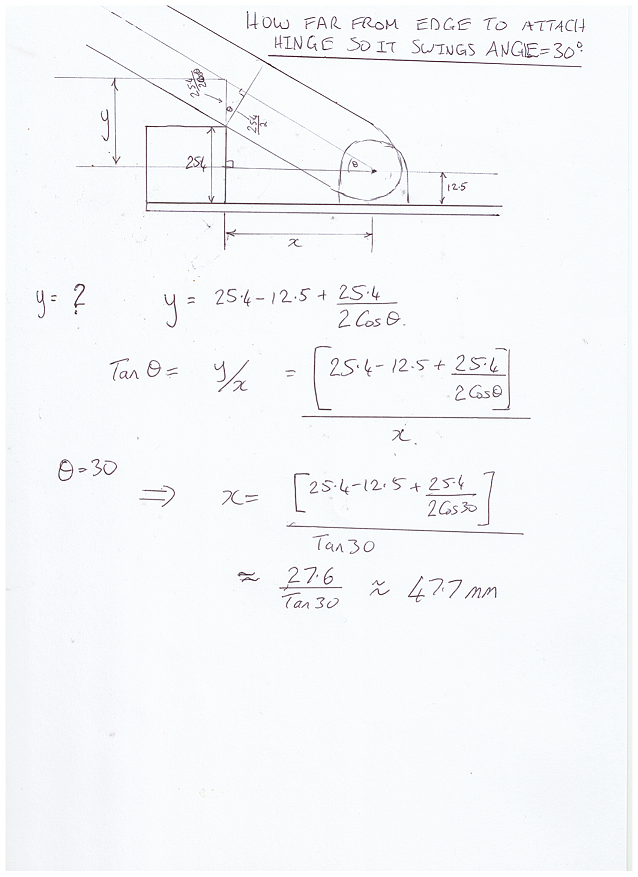
Next I wanted to install the leg hinges. I want the platform to be about 40cm above the ground and so with a leg length of 80cm, this means the legs must subtend an angle of 30 degrees with the platform. The side aluminum tube will provide a place for the legs to rest against to ensure 30 degrees angle is met. To get the angle of 30 degrees, we must place the legs a certain distance away from the tube. Please see calculations below.
Calculations to find hinge distance
I’ve started marking holes around and installing the hinges. See the picture below.
The rocket hasn’t been completed…the launch buttons haven’t been installed. There is a reason I’ve decided to hold off on the install of the buttons/lugs is to complete the launch pads.
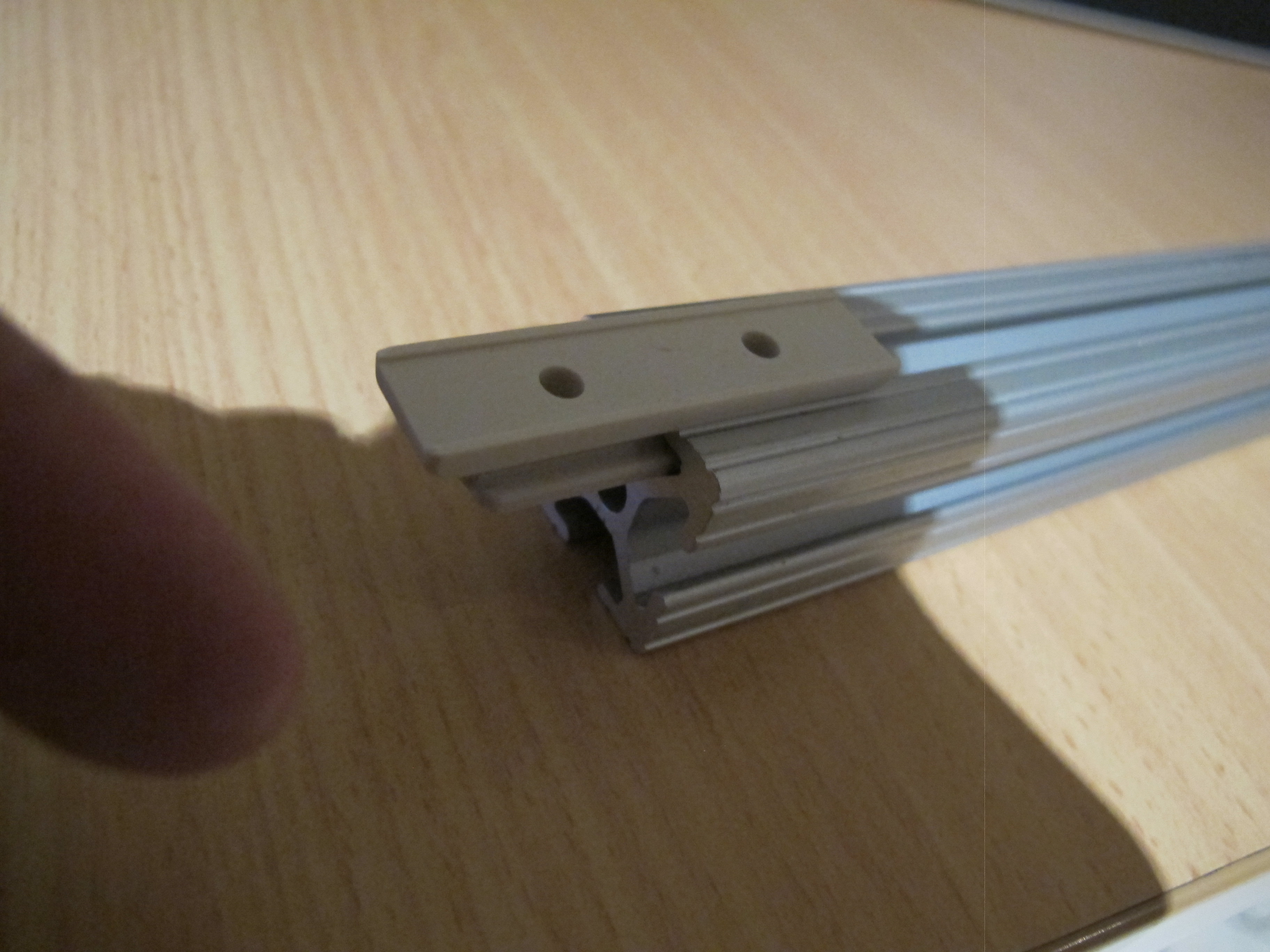
For those who do not know, the launch buttons/lugs are what we install on the rocket to guide it up the rail. See Picture below of a lug inside some 1010.
Launch Lug in 1010 Rail
Anyhow, I’ve received all the parts from 8020 that I need. A mong these parts is:-
4 x 80cm length of 1010 for the legs
1 x 25cm lenght of 1010 to mount 4053.
1 x 2.5m length of 1010 for the rail
An assortment of T-nuts and screws
1 x 4053 – 180 degree Pivot Bracket Assembly with “L” handles
4 x 4168 – Living Hinge Assy 0 degree
4 x 4181 (0 degree Living Nub …one at each end of the four legs)
Pictures of these below.
Assortment of small 8020 piecesLong 1010 rail and the four legs
I need more parts and tools to complete this part of the project. I needed to obtain :-
Aluminum Sheet – 500 x 500 x 5
3 metre length of 1inch Square profile Aluminium tube
Tap & Die kit
Four M6 screws
25 x 3/16″ screws with nuts and washers
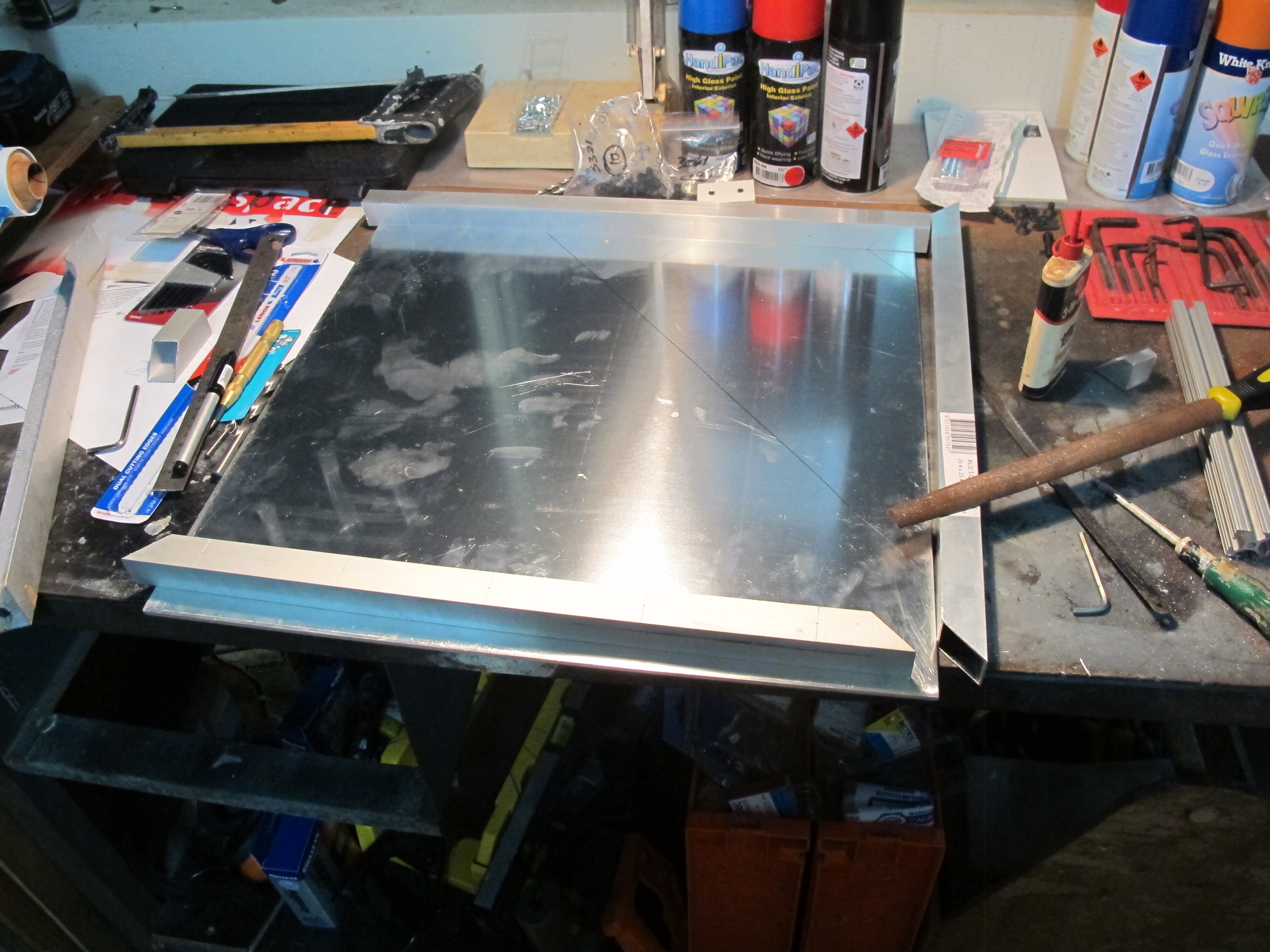
Below is a picture of the Aluminum sheet with some of the square profile pipe cut into pieces…almost ready for assembly around the rim of the square.
Aluminium sheet with square profile tube partially complete
Below is a picture of me Tapping a M6 hole into the ends of the Legs.
Tapping a hole
The holes were already 0.205 ” which is 5.207 mm. This is not too large for a M6 tap job.
Below is a picture of all legs with the Part #4168 attached.
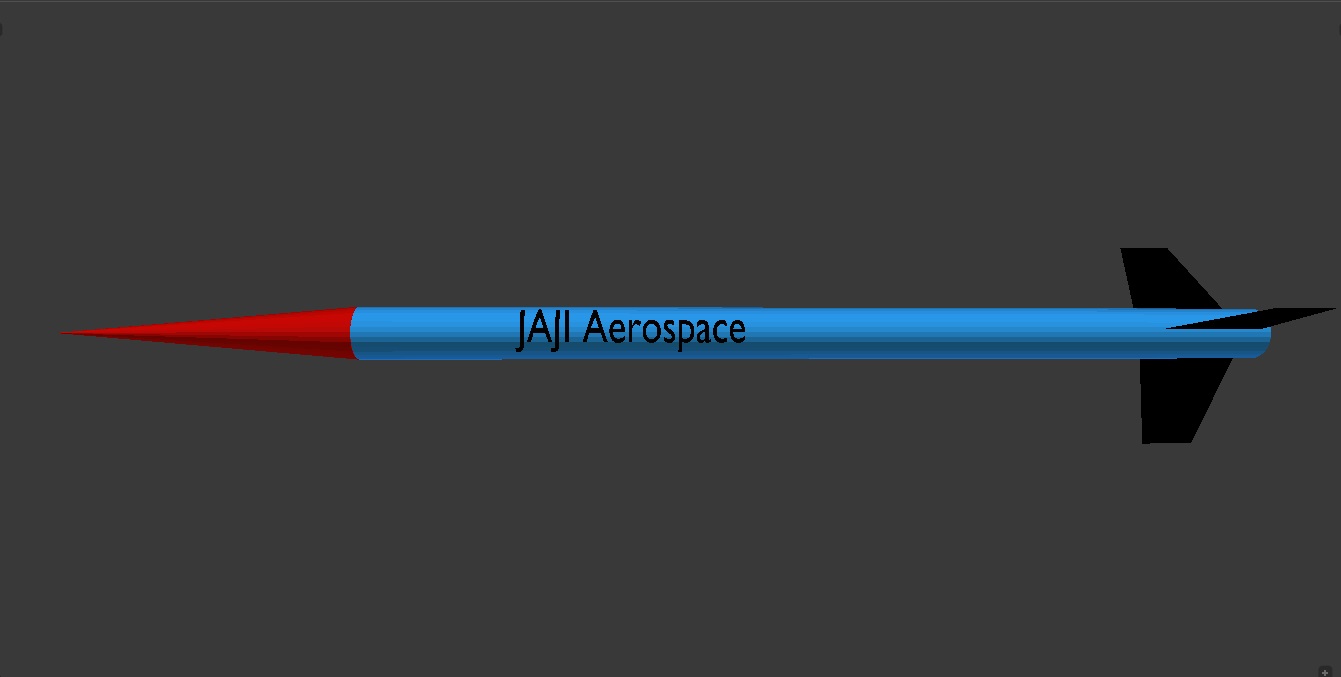
A number of designs were done up using Blender. I did this by measuring the rocket and creating a file. I then played about with different combinations. Below are some examples.
One of many designs.One of many designs.One of many designs.Jeremys top design
I also managed to figure out how to put some ‘text’ on the rocket tube to realistically show how it would look. Jeremy my son provided some possible designs and we ultimately adopted one of this designs; the last one shown.
The painting process was long and complex. There were times when I had to walk away to allow it to dry and then turn it over to paint more. Often I did very light coats, so as to avoid dripping. This meant I had to come back and do several coats though.
The basic steps followed were:-
Sand and clean up any imperfections in the rocket
Create a clean/free area (our garage) and put down newspaper
A place to paint
Prepare rocket on stands, with nose cone slightly withdrawn from tube and taped up together (in recess).
Cover up areas of rocket we do not want painted
Completed painted with white Primer
With Primer
Painted fins blue
Painted nose cone black
Painted body white
Covering up Nose code before painting tube.
Covering up Fins before painting tube.
Created stencil from a computer print out….using a scalpel blade. Carefully placed on rocket. Also attached bands to make the red stripes
Carefully cut out
Carefully painted red writing and stripes.
Almost ready to attach stencil
Part way through painting lettering and stripes.
Very VERY carefully remove tape and paper to reveal the finished item.
To ensure a strong rocket, we need to add fillets to the fins where they meet the Quantum tub on the inside and where the fins meet the Motor Mount.
First we removed the Aft Ring (pulling on the cellophane tags). This reveals the inside as shown below.
Removed Aft ring to allow us to create Fin fillets
We then created a small batch of 5-minute Areldite and started to create a fillets. (3 x 4 = 12 fillets) in total. We used some doweling to get the Areldite all the way from the front end to the back. It was a messy job and it was hard to stop getting glue everywhere, but we tried hard. We made a special effort to stop any glue getting inside the motor mount and if any glue got on the outside of the motor mount (at the back end), we quickly wiped it off with a rag. We did this because we need to be able to insert the motor and we need to be able to put on the motor retainer.
Once this was complete, we then needed to put the AFT Motor Ring back into the quantum tubing with sufficient amount of Areldite to ensure it would not come out.
What can we learn from this?
While the external fillets created are strong and will definitely hold the fins in place, because there is no camber (concave surface), we have an abrupt change in surface direction and this will invite turbulent flow and so drag. This probably won’t be detrimental to the flight, but the maximum altitude won’t be attained. Something to be mindful of in L2 and other future rocket builds.
The rocket motor doesn’t get attached directly to the Callisto’s Quantum Tube. The motor is inserted into the motor mount tube. This ‘motor mount’ (a cardboard tube) is secured inside the Quantum Tubing with some circular rings that are glued. These rings themselves are also glued to the motor mount tube and we have the Piston strap (A strong thick black cord) securely glued to the motor mount. Some pictures of the construction of this component are shown below:-
Using 5 minute Areldite to glue the forward motor mount ring
We created fillets around the motor mount ring to ensure it will not budge during flight or ejection.
Notice the ~1 inch slot. This is for the Piston Strap.
We took care here to ensure we did not clog up the slot. We insert the piston strap into this slot later on and Areldite it in place.
Put Celopane around the Aft Motor mount Ring
All rings put on to Motor Mount
Securely attaching the Piston Strap to the Motor Mount.
After the Piston Strap glue had tried, we packed it inside the motor mount to keep it out of the way in the next lot of steps.
Next step was to start gluing the Motor Mount to the rocket tube. We put some Areldite ~7inches into the back of the rocket (in a ring) using some long doweling. We then pushed the Motor Mount all the way in, till the appropriate amount was sticking out. (We are using HAMR motor mount, so we need to leave sufficient amount of space to attach Retainer on to the motor mount). We had to leave the rocket in a vertical position to allow the glue to flow down and remain against the motor mount top ring.
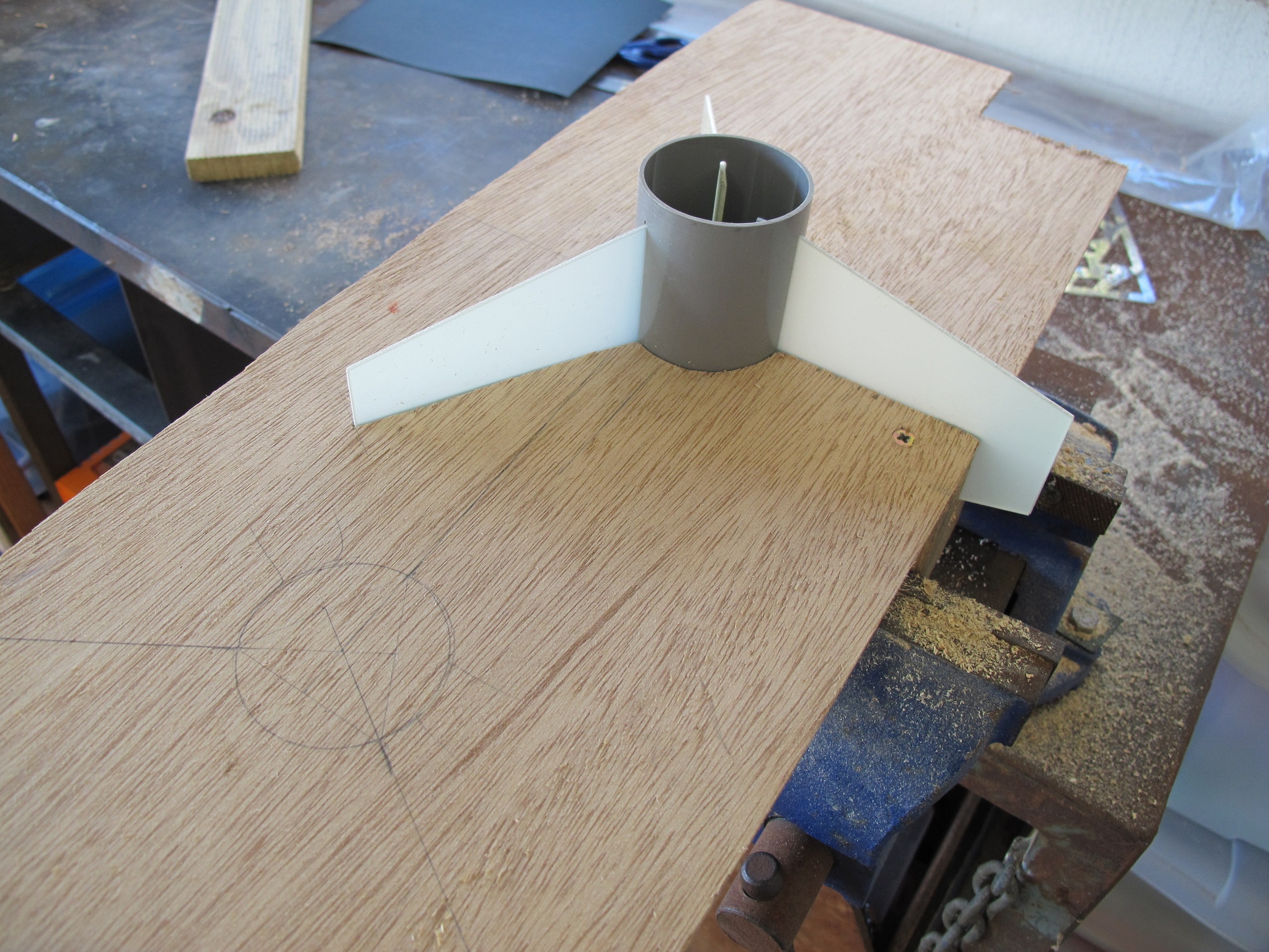
I started bulding the rocket up by first making a jig to keep the fins orientated 120degrees apart. I decided this was critical for a successful flight and so did this immediately. Some pictures are shown below of this.
Ply Wood with hole cut into it, Just large enough for Quantum Tube to fit in
Quantum Tube fits snuggly inside Plywood hole
Cuts made in Ply wood at 120 degrees allow correct positioning of fins in Quantum Tubing.
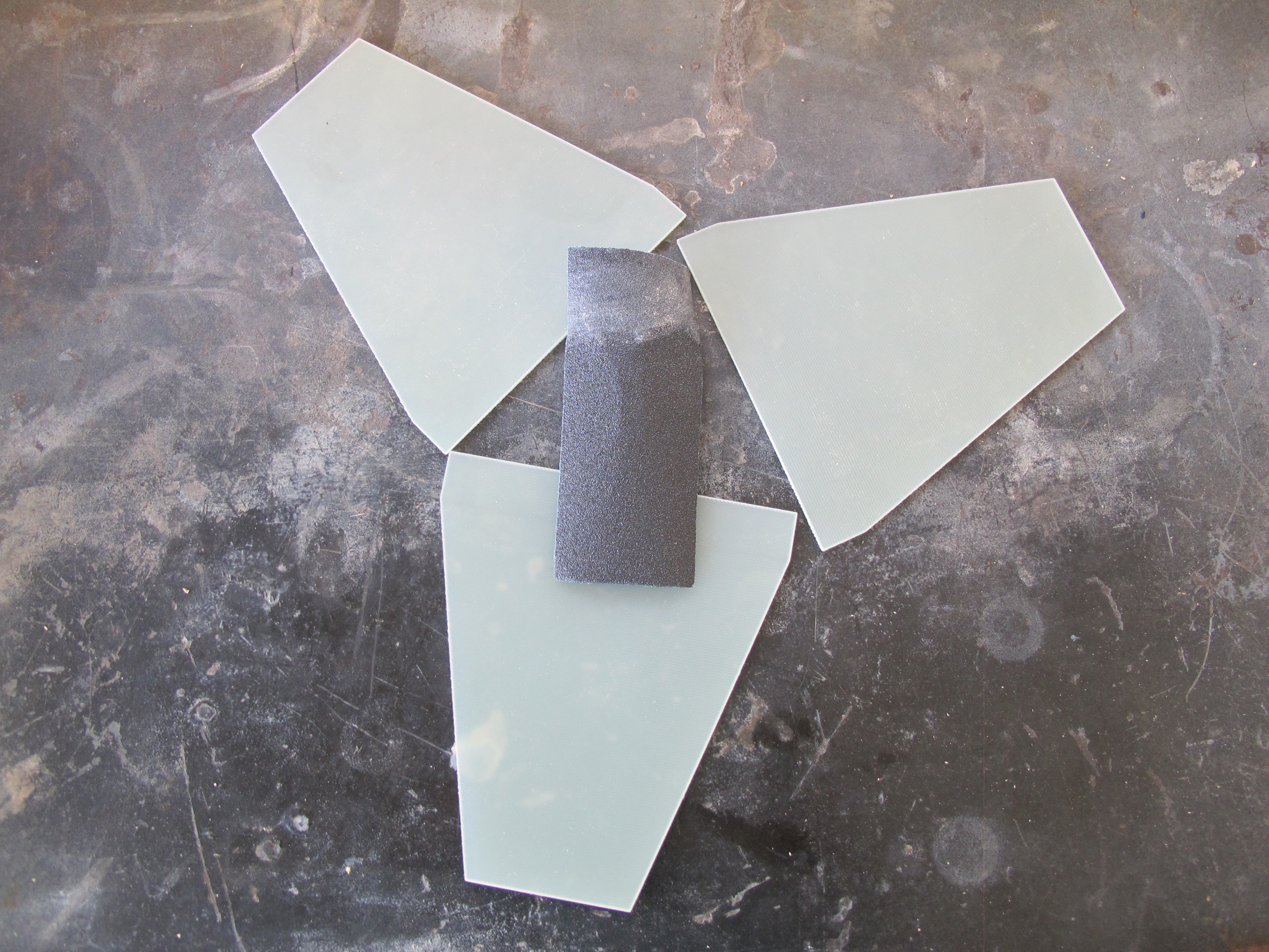
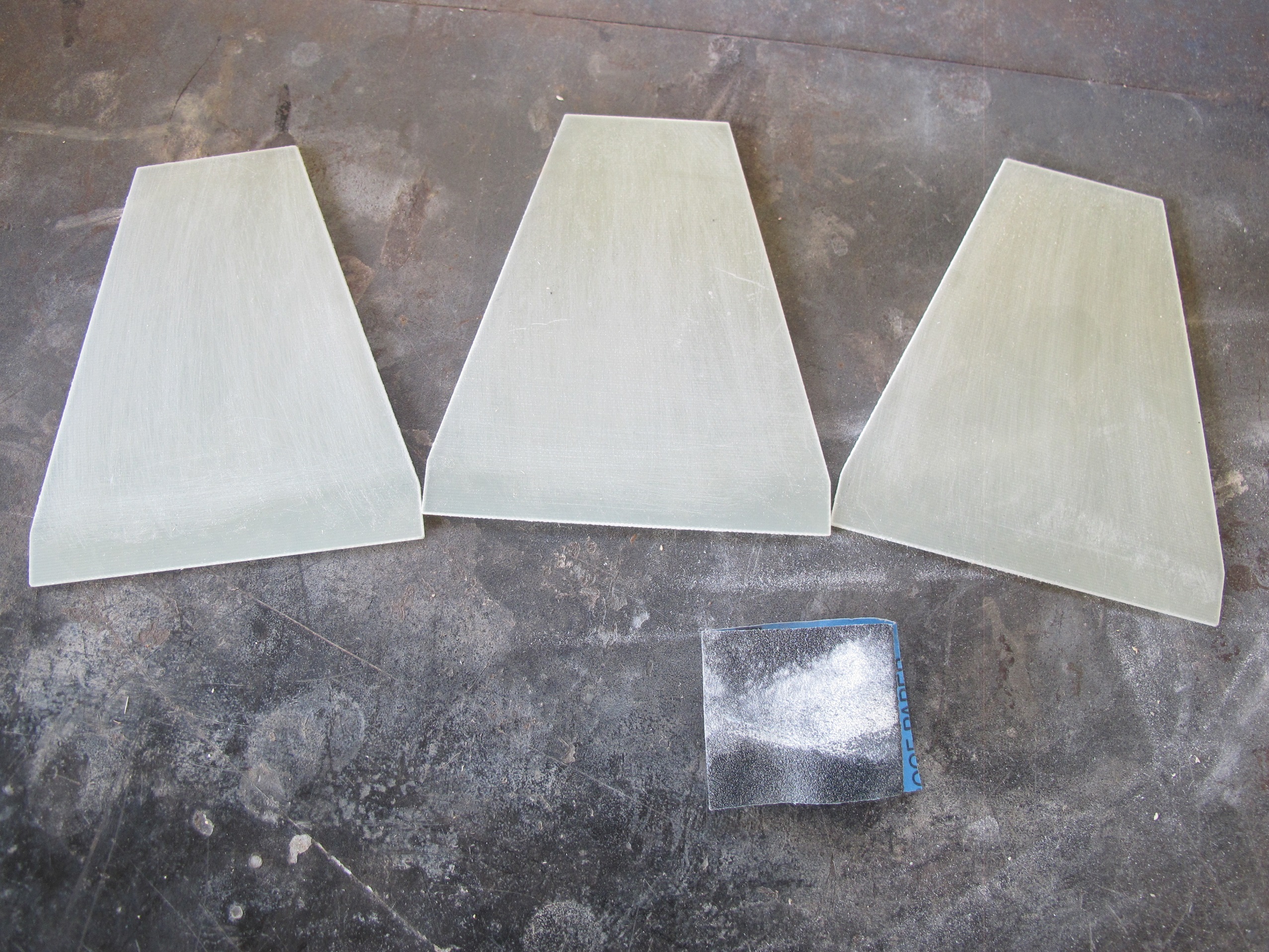
I had to sand the cuts in the plywood with sandpaper to widen the gap to allow the Fibreglass fins to snuggly slide in them.
It is easier to scuff the fins, so that the primer sticks easily to the fins before they are attached to the rocket tube. So we do that now. See pictures below of this.